|
abb_staubli_planning.world File Reference Detailed Description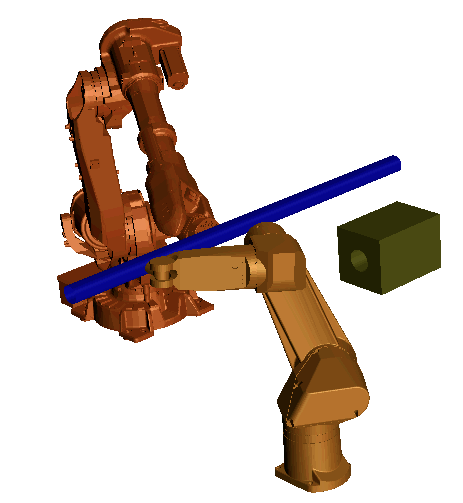
This is an example to show that we can easily mix different robots and solve path planning problems without changing our algorithms. In particular here we extend the abb_planning.world problem and use two robots, an ABB and a Staubli robot, to manipulate a bar that has to be inserted into a hole. To solve this path planning problem execute
and visualize the solution path with
This path can be smoothed executing and the smoothed path can be visualized with
Definition in file abb_staubli_planning.world. |
Follow us!