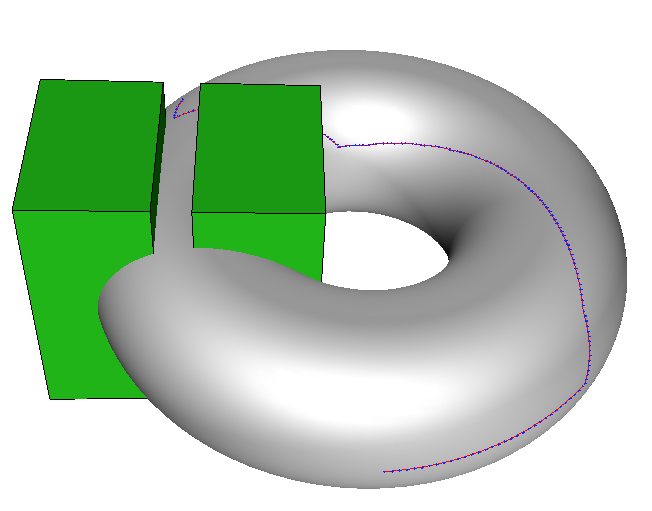
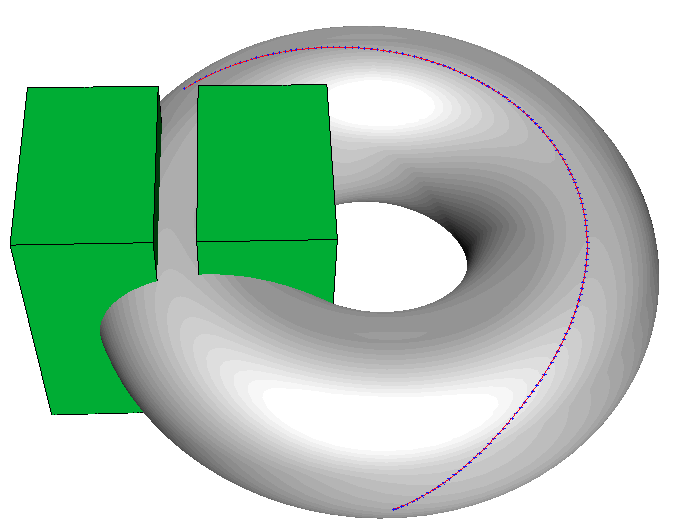
A point moving on a torus with obstacles. A very simple example used to test path planning algorihtms. The nice thing of this example is that results can be easily visualized.
This is used for asymptotically-optimal path planning (our RSS-12 paper)
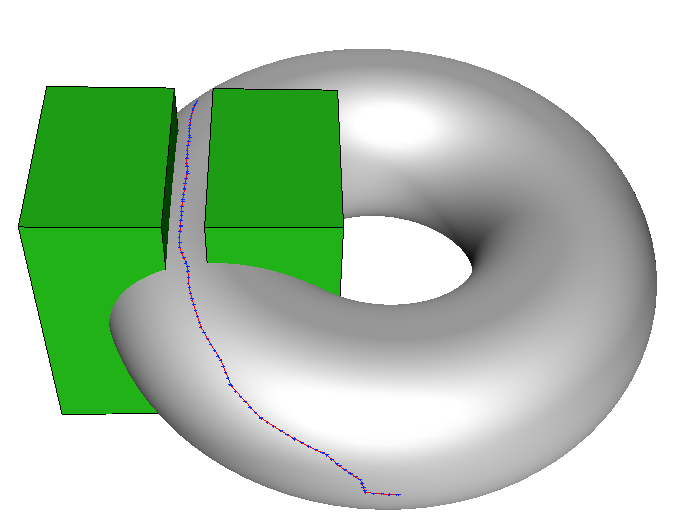
The difference with torus.world is that here there is one obstacle less. The allows for a long (but easy to find) path to the goal and a short path (harder to find since in implies to enter a narrow corridor). Moreover, the start configuration is different (the goal is the same).
The key data for this problem are:
| Ambient space dimension (in the simplified system) | 7 |
| Configuration space dimension | 2 |
| Average planning time with bin/cuikatlasrrt (in seconds) | 0.01 |
| Average planning time with bin/cuikatlasrrtstar (in seconds) | 2.5 |
This example is treated following these steps (from the main CuikSuite folder):
- Adjust the parameters: Different algorithms use different parameter settings. Just check the parameter file and uncomment the appropriate lines.
- Solve the path planning problem:
- Solve the path planning problem: alternative planners
- Visualize the solution path: Whatever the planning method used
- Visualize the solution path on the torus: We plot the path and show it on the tours. We also show the obstacles, but, plesase take into account that the moving object is a ball, thus, the narrow corridor is narrower that what is seen (should be narrowed by the radii of the moving ball).
- bin/cuikplotpath examples/Torus/torus2 examples/Torus/torus2_path 12 13 14
- geomview examples/Torus/torus2_path.gcl examples/Torus/bodies/body1 examples/Torus/bodies/body2 examples/Torus/bodies/torus.bez
- Smooth the path and visualize it Observe that this is not the optimal paths
- bin/cuiksmoothpath examples/Torus/torus2
- bin/cuikplotpath examples/Torus/torus2 examples/Torus/torus2_spath 12 13 14
- geomview examples/Torus/torus2_spath.gcl examples/Torus/bodies/body1 examples/Torus/bodies/body2 examples/Torus/bodies/torus.bez
- Approximate and display the optimal path: using an asymtotically-optimal planner
- bin/cuikatlasrrtstar examples/Torus/torus2
- bin/cuikplotpath examples/Torus/torus2 examples/Torus/torus2_path 12 13 14
- geomview examples/Torus/torus2_path.gcl examples/Torus/bodies/body1 examples/Torus/bodies/body2 examples/Torus/bodies/torus.bez
Definition in file torus2.world.
Follow us!