|
wafr.world File Reference Detailed Description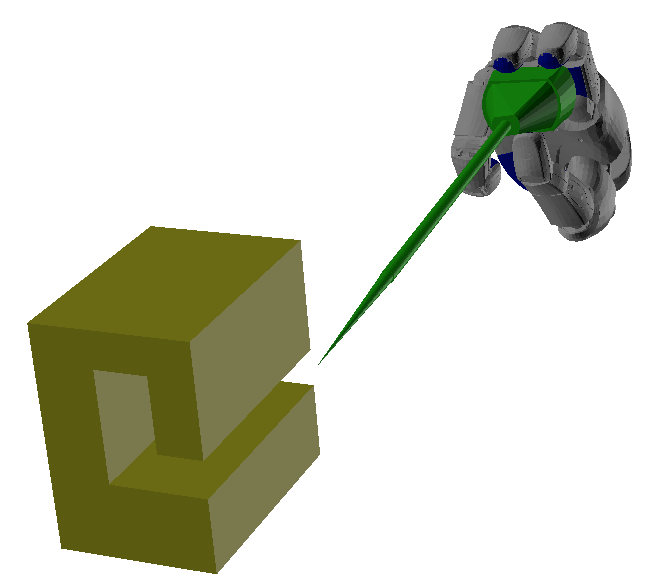
The DLR-II robot hand hoding a needle with 3 fingers. This is one of the examples we used in our IJRR-12 paper where we introduce the bin/cuikatlasGBF planner. This example is difficult when using REPRESENTATION = LINKS (the one used in the IJRR-12 paper) and an easy when using REPRESENTATION = JOINTS. The key data for this problem are:
This example is treated following this steps (from the main CuikSuite folder):
Definition in file wafr.world. |
Follow us!