|
prism.tens File Reference Detailed Description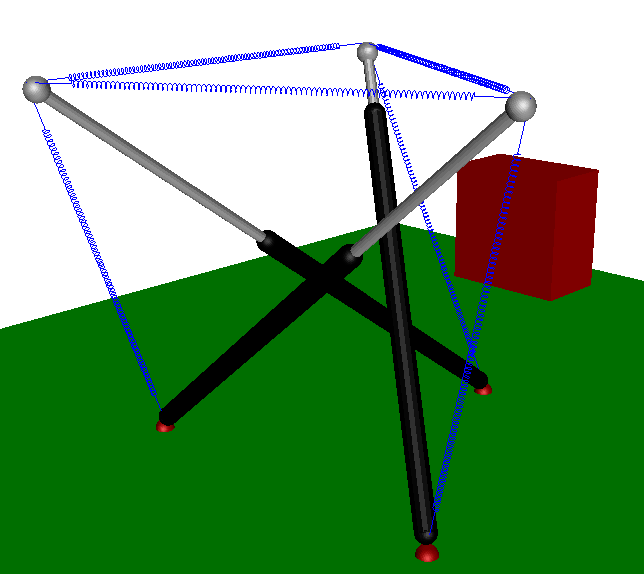
This file defines a variant of the simple_prism.tens example. Here the struts are replaced by prismatic bars and the three botteom nodes are fixed to the ground. This structure models the tensegrity robot build at IRI in a project coordinated by J.M. Mirats: 
The structure only has two degrees of freedom: the top triangle translated parallel to the base, without rotating. The simplest way to manipulate this file is to execute
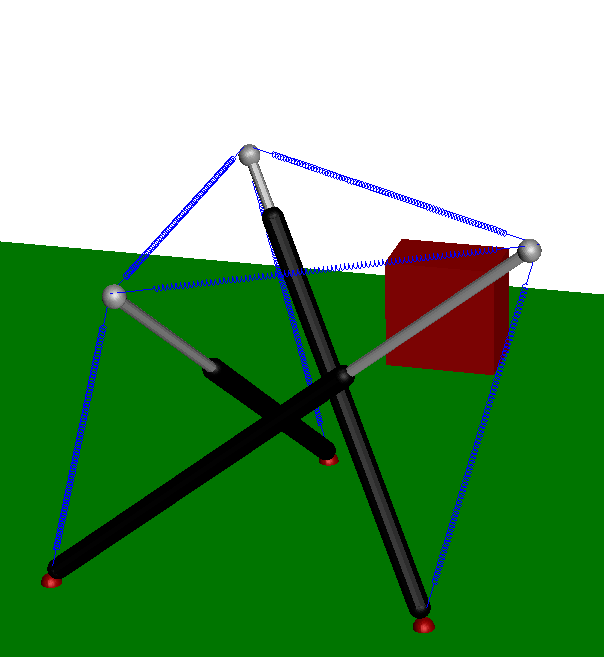
This application allows to select the different variables of the structure and to increase/decrease them. The structure ajusts accordingly. Please note that both the kinematic and force equations are taken into account for this ajustment. So all the configurations are in equilibrium. The example includes an obstacle which limits the motions of the structure. To connect these two configurations
a path around the obstacle must be found. This can be obtained executing:
The solution path can be visualized with
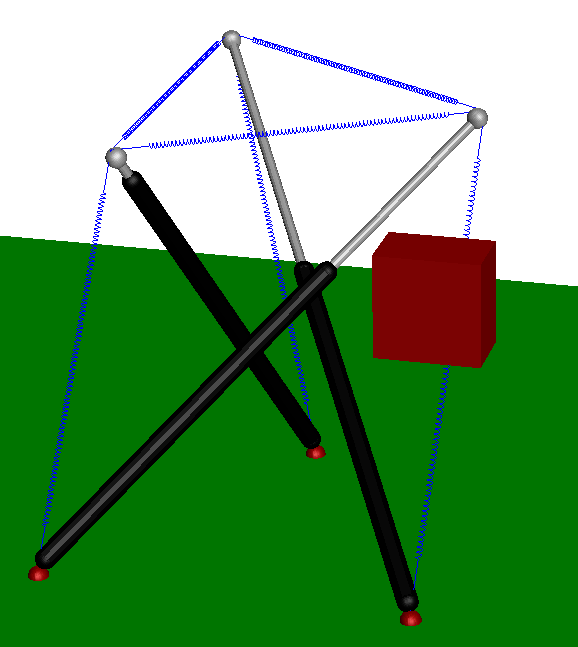
You can activate/deactivate the collision detection configuration (it is at the end of the prism.tens file) to see the difference in the solution path. Solutions paths provided by probabilistic planners are typically jerky. To avoid this, we can smooth the output path
which perform first a path length minimization and the a reduces the control effort. This process is more effective than directly reducing the path effort on the original path: the shortcut path is very effective and it returns a path that is not far from the minimum control effort path (recall that if all elements in the tensegrity are elastic, the control effort and the path length are the same). The final path can be visualized executing
Definition in file prism.tens. |
Follow us!