Master Thesis
Action segmentation on cloth manipulation tasks
Supervisor/s
Information
- If you are interested in the proposal, please contact with the supervisors.
Description
The Perception and Manipulation group, has been doing research for several years on learning, perception and manipulation of robotic tasks, and in the last decade, with special interest in cloth manipulation.
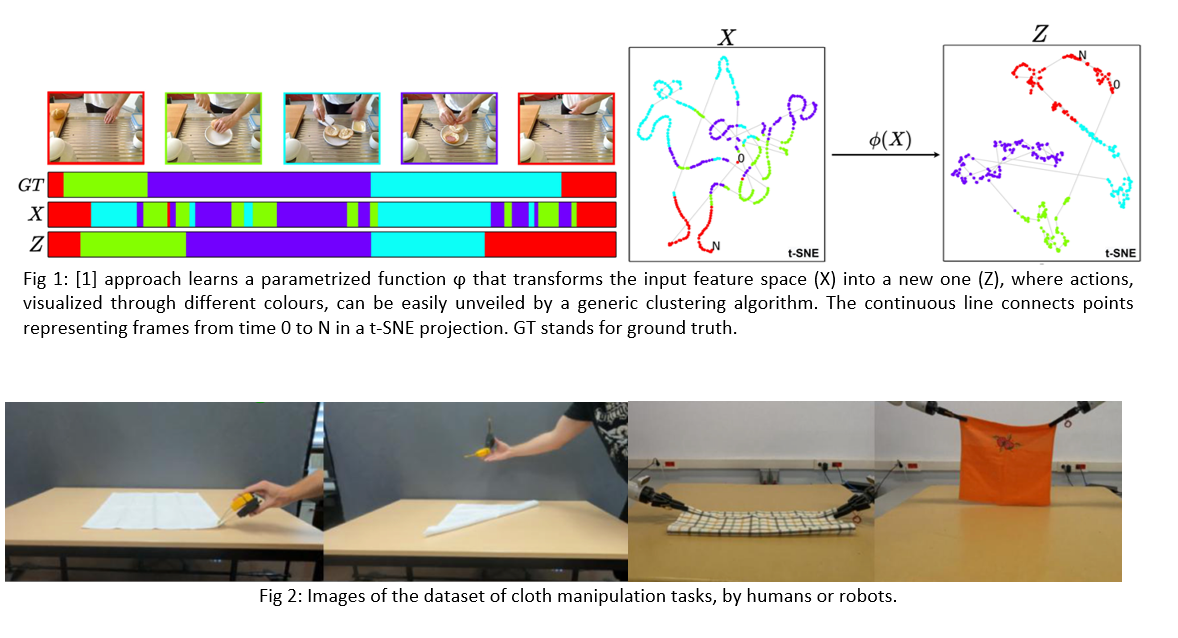
On the perception part, we have very recent and novel results on action segmentation [1]. This consists on recognizing, from a video of a person performing a task, what are the different steps of the action or tasks that is performing. This is important to understand tasks and to enable robotic learning from observation.
We are seeking a student that will apply our method for action segmentation to actions of cloth manipulation. Using a fully labelled dataset that we already have in our lab, the student will apply our recent results on a new task, design if needed modifications on the model and see if it can generalize, for instance, to tasks that are performed by robots instead of humans.
We are looking for motivated students with good programming skills. We can do a Master thesis or an internship.
[1] E.B. Bueno Benito, B. Tura and M. Dimiccoli. Leveraging triplet loss for unsupervised action segmentation, 2023 CVPR Workshop on Learning with Limited Labelled Data, pp. 4922-4930, 2023. Download here


Follow us!