|
RSS11Hand Directory Reference Detailed DescriptionThe example used in the RSS'11 paper. 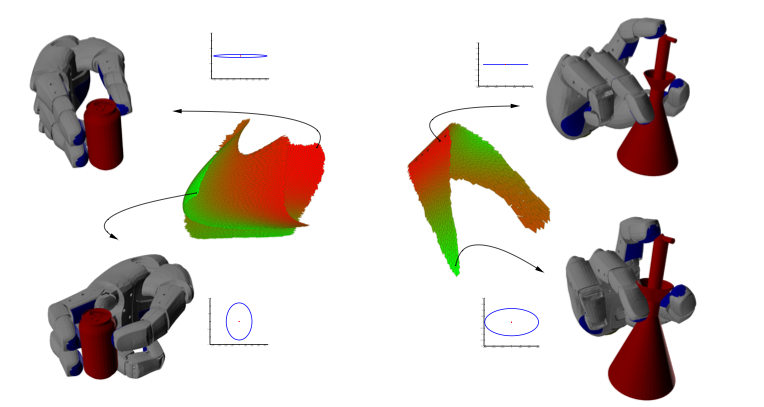
The manipulation examples used in the RSS-11 paper. The paper is about the optimization of robotics graps. Please, check the scripts
for detailed instructions on how to process these problems. To use these scripts you need to install Matlab. Note that the procedure is quite involved because it uses many of the applications in the CuikSuite and combines them with matlab to compute the contact equations and the manipulability indices. Moreover, the problems in this folder are slight variations of those in the paper (namely, the contact points are different). Thus, the final atlas are not exactly the same as those in the paper, but equivalent. Questions regarding these examples should be addressed to Carlos Rosales.
| ||||||||||||||||||||||||||||||||||||||||||||
Follow us!