Institut de Robòtica
i Informàtica Industrial
Perception and Action in Robotics
National DPI Projects PAU (2009-2011) and PAU+ (2012-2014)
Pose and shape recovery of rigid and non-rigid objects


Highlighted Publications
E. Trulls, I. Kokkinos, A. Sanfeliu, F. Moreno-Noguer.
Conference on Computer Vision and Pattern Recognition (CVPR), 2013 (to appear)
Show Abstract
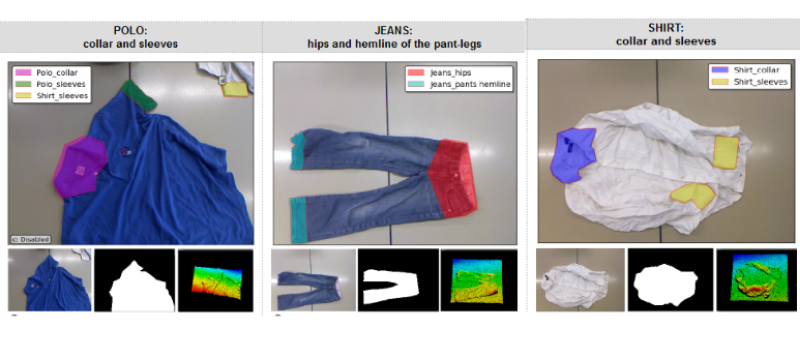
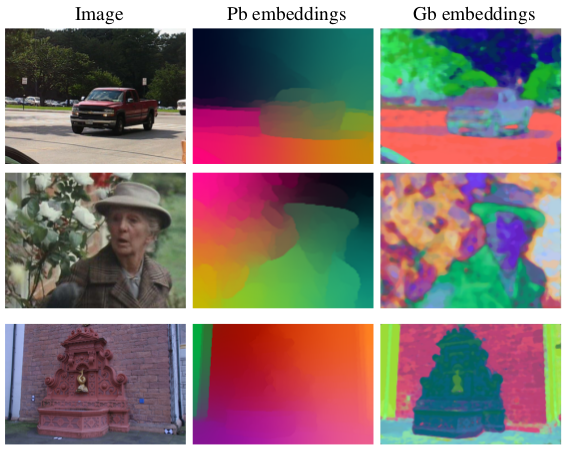
In this work we exploit segmentation to construct appearance descriptors that can robustly deal with occlusion and background changes. For this, we downplay measure- ments coming from areas that are unlikely to belong to the same region as the descriptor’s center, as suggested by soft segmentation masks. Our treatment is applicable to any im- age point, i.e. dense, and its computational overhead is in the order of a few seconds.
E. Simo-Serra, A. Quattoni, C. Torras and F. Moreno-Noguer.
2013 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2013, Portland, USA, pp. 3634--3641.
Show Abstract
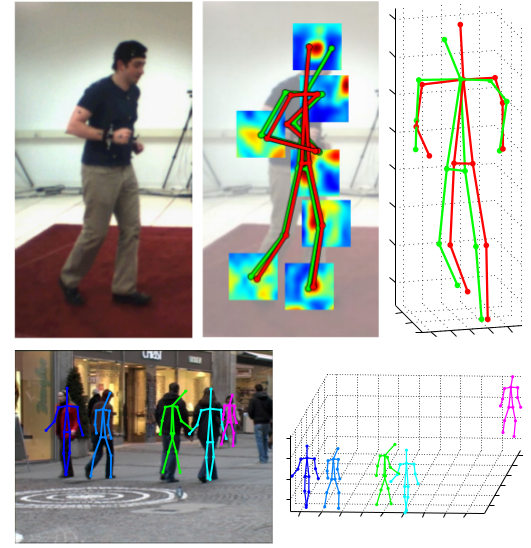
We introduce a novel approach to automatically recover 3D human pose from a single image. We address this issue by jointly solving both the 2D detection and the 3D inference problems. For this purpose, we propose a Bayesian framework that integrates a generative model based on latent variables and discriminative 2D part detectors based on HOGs, and perform inference using evolutionary algorithms.
F. Moreno-Noguer and P. Fua.
IEEE Transactions on Pattern Analysis and Machine Intelligence, 35(2): 463-475, 2013.
Show Abstract
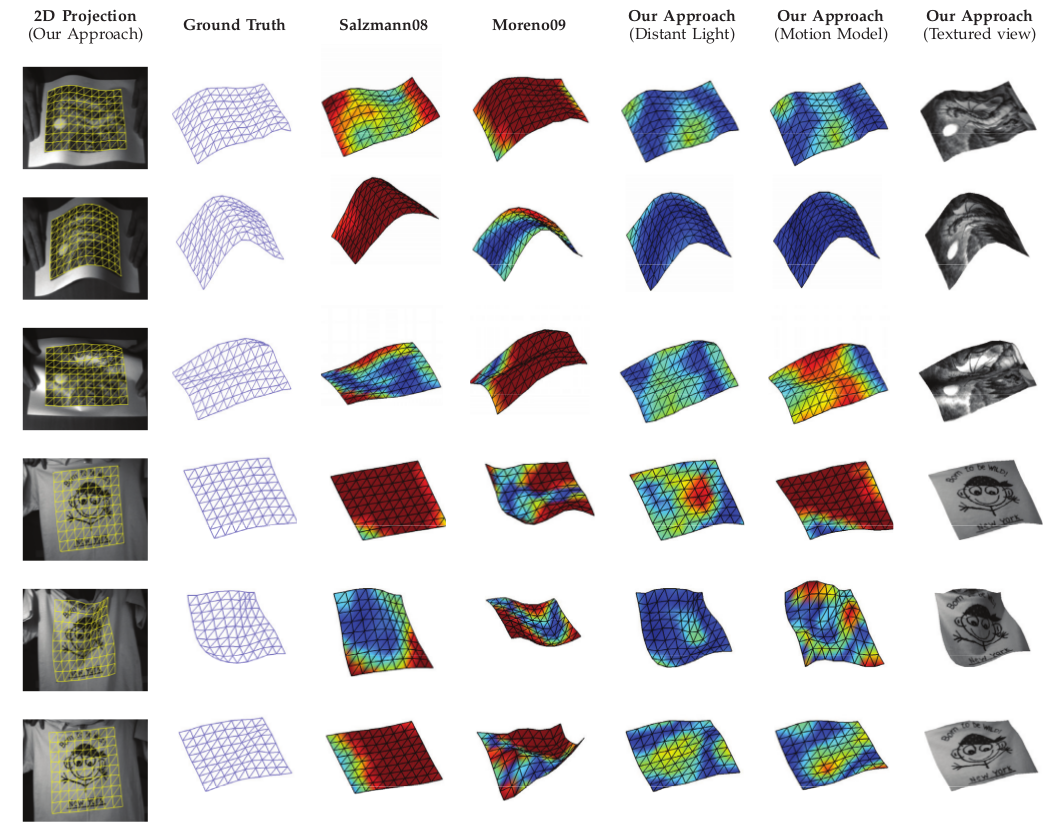
We introduce a stochastic sampling approach to efficiently explore the set of solutions of an objective function based on point correspondences. This allows us to propose a small set of ambiguous candidate 3D shapes and then use additional image information to choose the best one. As a proof of concept, we use either motion or shading cues to this end and show that we can handle a complex objective function without having to solve a difficult nonlinear minimization problem.
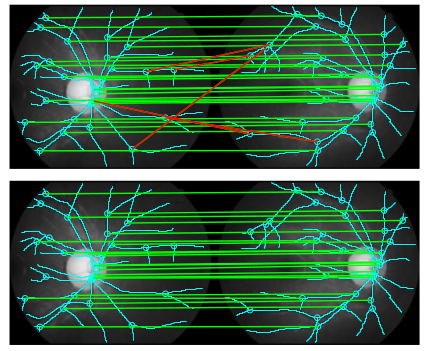
E. Serradell, P. Glowacki, K. Jan, F. Moreno-Noguer and P. Fua.
2012 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2012, Providence, Rhode Island, pp. 996-1003, IEEE Press.
Show Abstract
We present a new approach to matching graphs embedded in R2 or R3. To handle arbitrary non-linear deformations, we represent them as Gaussian Processes. In the absence of appearance information, we iteratively establish correspondences between graph nodes, update the structure accordingly, and use the current mapping estimate to find the most likely correspondences that will be used in the next iteration.
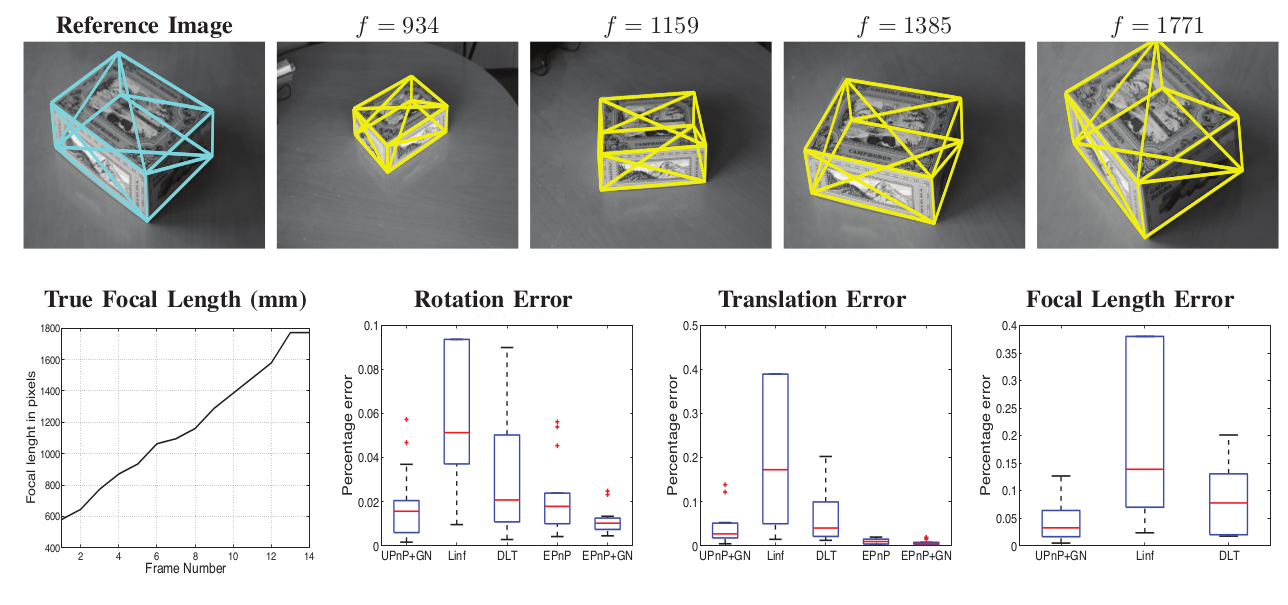
A. Penate-Sanchez, J. Andrade-Cetto and F. Moreno-Noguer.
IEEE Transactions on Pattern Analysis and Machine Intelligence, 35(10): 2387-2400, 2013.
Show Abstract
We propose a novel approach for the estimation of the pose and focal length of a camera from a set of 3D-to-2D point correspondences. Our method compares favorably to competing approaches in that it is both more accurate than existing closed form solutions, as well as faster and also more accurate than iterative ones. We present new methodologies to circumvent this limitation termed exhaustive linearization and exhaustive relinearization which perform a systematic exploration of the solution space in closed form.
Follow us!