Institut de Robòtica
i Informàtica Industrial
Perception and Action in Robotics
National DPI Projects PAU (2009-2011) and PAU+ (2012-2014)
Object-action recognition and replication



Highlighted Publications
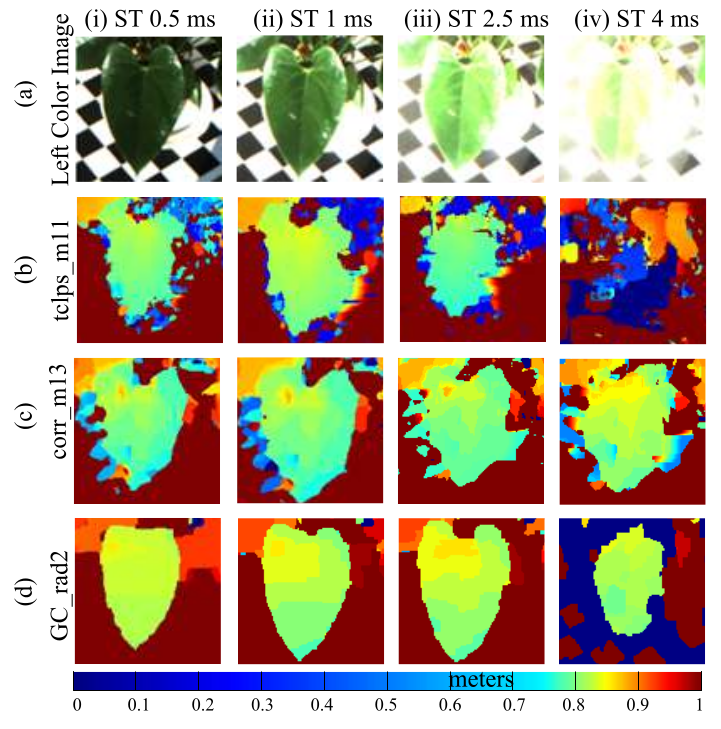
W. Kazmi, S. Foix, G. Alenyà and H.J. Andersen.
ISPRS Journal of Photogrammetry and Remote Sensing, 88: 128-146, 2014.
Show Abstract
In this article we analyze the response of Time-of-Flight (ToF) cameras (active sensors) for close range imaging under three different illumination conditions and compare the results with stereo vision (passive) sensors. ToF cameras are sensitive to ambient light and have low resolution but deliver high frame rate accurate depth data under suitable conditions. Based on these metrics, we analyze and compare depth imaging of leaf under indoor (room) and outdoor (shadow and sunlight) conditions by varying exposure times of the sensors. Performance of three different ToF cameras (PMD CamBoard, PMD CamCube and SwissRanger SR4000) is compared against selected stereo-correspondence algorithms (local correlation and graph cuts).
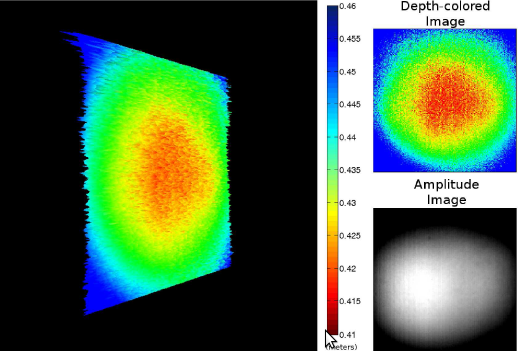
S. Foix, G. Alenyà and C. Torras.
IEEE Sensors Journal, 11(9): 1917-1926, 2011.
Show Abstract
This paper reviews the state-of-the art in the field of lock-in ToF cameras, their advantages, their limitations, the existing calibration methods, and the way they are being used, sometimes in combination with other sensors.
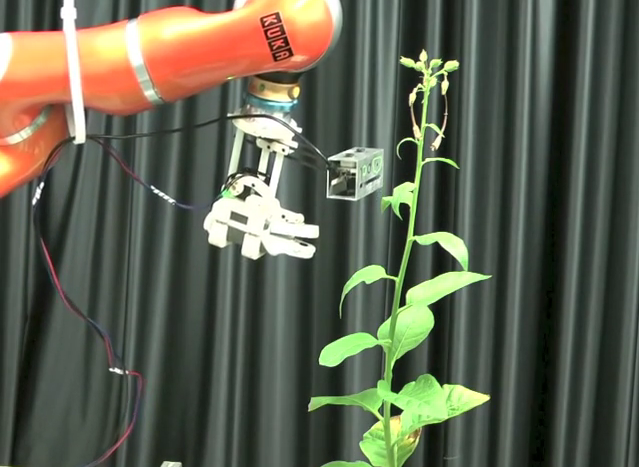
G. Alenyà, B. Dellen, S. Foix and C. Torras.
IEEE Robotics and Automation Magazine, 20(3): 50-59, 2013.
Show Abstract
Supervision of long-lasting extensive botanic experiments is a promising robotic application that some recent technological advances have made feasible. Plant modeling for this application has strong demands, particularly in what concerns three-dimensional (3-D) information gathering and speed.
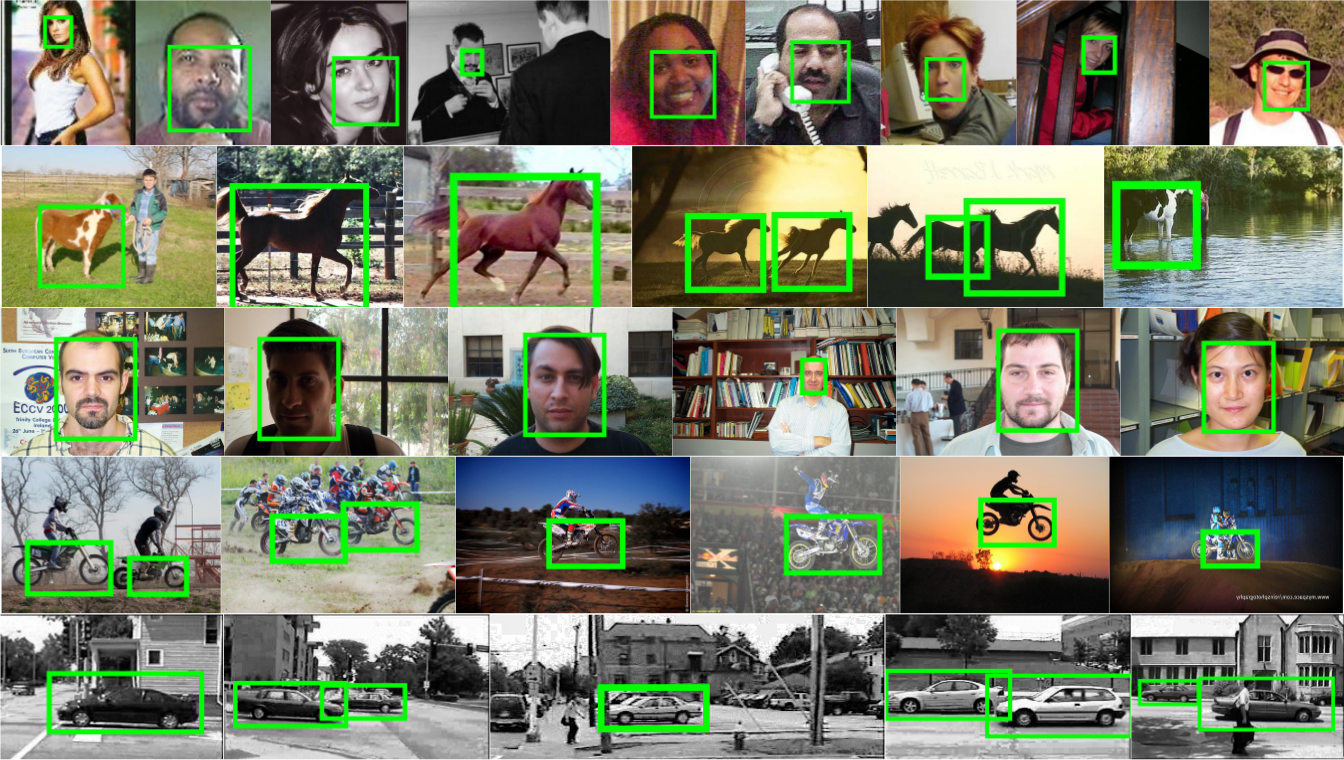
M. Villamizar, J. Andrade-Cetto, A. Sanfeliu and F. Moreno-Noguer.
Pattern Recognition, 45(9): 3141-3153, 2012.
Show Abstract
In this paper we show that the performance of binary classifiers based on Boosted Random Ferns can be significantly improved by appropriately bootstrapping the training step. This results in a classifier which is both highly discriminant and computationally efficient and is particularly suitable when only small sets of training images are available.
Follow us!