Institut de Robòtica
i Informàtica Industrial
Perception and Action in Robotics
National DPI Projects PAU (2009-2011) and PAU+ (2012-2014)
SLAM - Simultaneous Localization and Mapping



Highlighted Publications
R. Valencia, M. Morta, J. Andrade-Cetto and J.M. Porta.
IEEE Transactions on Robotics, 29(4): 1050-1059, 2013.
Show Abstract
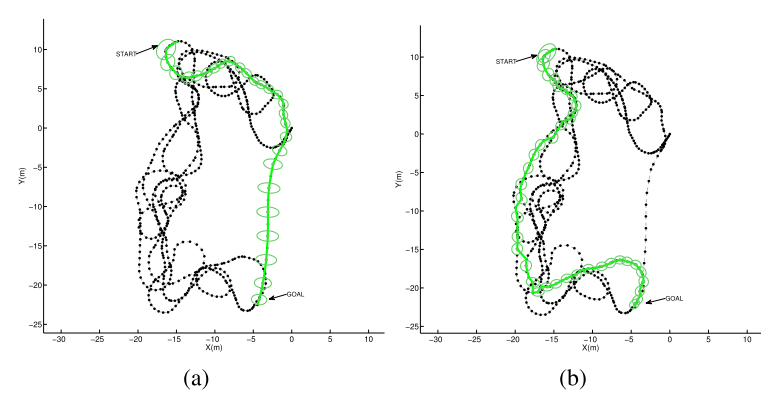
In this paper we argue that Pose SLAM graphs can be directly used as belief roadmaps, and present a method that devises optimal navigation strategies by searching for the path in the pose graph with lowest accumulated robot pose uncertainty, independently of the map reference frame. The method shows improved navigation results when compared to shortest paths both over synthetic data and real datasets.
T. Vidal-Calleja, A. Sanfeliu and J. Andrade-Cetto.
IEEE Transactions on Systems, Man and Cybernetics: Part B, 40(6): 1567-1581, 2010.
Show Abstract
A method for evaluating, at video rate, the quality of actions for a single camera while mapping unknown indoor environments is presented. The strategy maximizes mutual information between measurements and states to help the camera avoid making ill-conditioned measurements that are appropriate to lack of depth in monocular vision systems.

V. Ila, J.M. Porta, and J. Andrade-Cetto.
Robotics and Autonomous Systems, 59(5):310-318, 2011.
Show Abstract
The computational bottleneck in information-based SLAM is state mean and covariance recovery. In this paper we present a method to state estimation that is linear both in execution time and memory footprint at loop closure, and constant otherwise.
V. Ila, J.M. Porta and J. Andrade-Cetto.
IEEE Transactions on Robotics, 26(1): 78-93, 2010.
Show Abstract,
This paper offers principled solutions to reduce the state size
and the number of loop closures in Pose SLAM by considering
only nonredundant poses and informative links.
The method also includes a tree-based technique to search for neighboring poses that scales logarithmically with the number of states.
Follow us!