|
Welding Directory Reference Detailed Description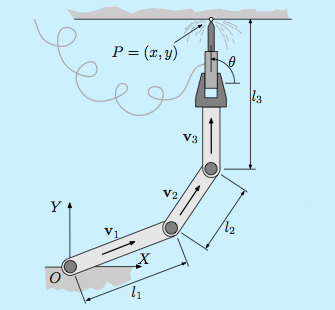
A simple tutorial to introduce the CuikSuite tools. In this example we have a planar serial robot with 3 degrees of freedom that has to weld on a beam. In a first case the robot only has to weld on a point and it has to reach it with a given orientation. In the second case, the robot has to weld a line on the beam with the welding tool orthogonal to the beam. Finally, the task is relaxed to weld a line on the beam but allowing any orientation of the welding tool. The less the constraints on the welding tool, the higher the dimension of the configuration space to explore. This example is used as a small tutorial introducing the tools in the CuikSuite. The tutorial starts by the simplest case (with 0-dimensional solution sets solved using branch-and-prune techniques) and goes to more complex situations (2-dimensional solution sets explored using higher-dimensional continuation techniques). Please, follow the steps below to replicate the results in the paper:
| ||||||||||||||||||||||||||||||||
Follow us!