The example of the RAM paper used to compute the rechable workspace of the robot, without considering any constraint on the position of the welding tool.
This example is treated following these steps (from the main CuikSuite folder):
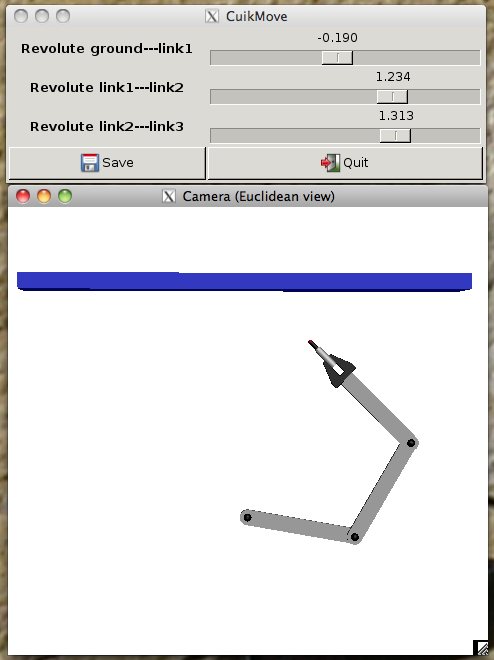
- On-line illustration of the possible robot motions without considering any constraint: Execute
- scripts/cuikmove examples/Welding/Welding_open
- Note that the collisions do not limit the motion (but they are detected and printed in the console).
- Generate the equations to compute the reachable workspace of the welding tool (called end_effector in the example)
- Isolate the borders of the reachable workspace: This takes about a minute on a Intel Core i7 at 2.93 Ghz running Mac OS X
- bin/cuik examples/Welding/Welding_open_TWS
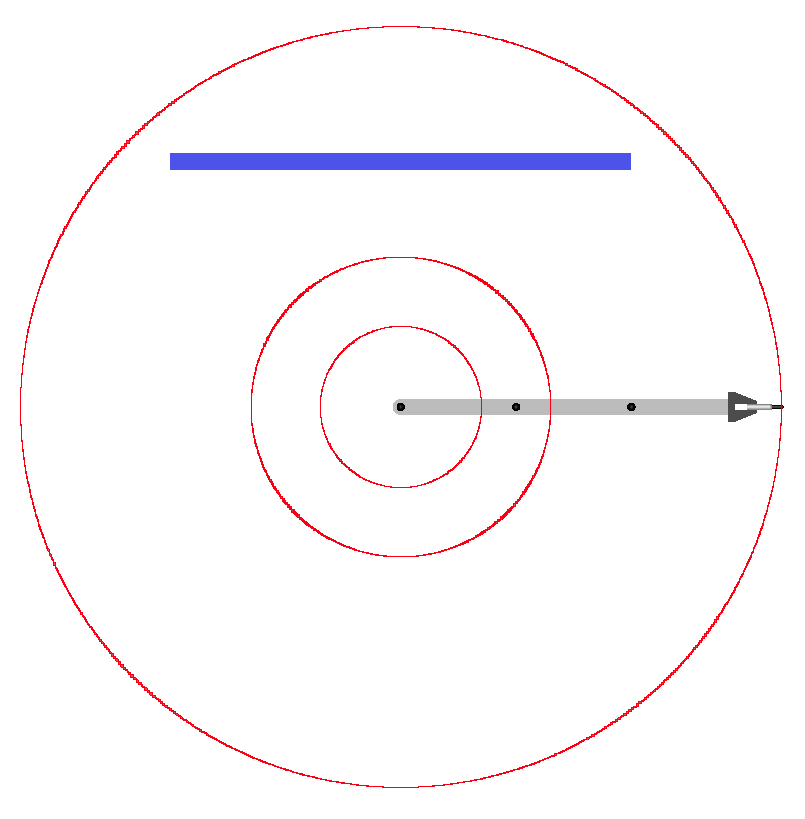
- Plot the borders of the workspace
- bin/cuikplot3d examples/Welding/Welding_open_TWS 7 8 9 0 Welding_open_TWS.gcl
- and visualize it
- scripts/cuikmove examples/Welding/Welding_open
- Load Welding_open_TWS.gcl using the geomview menu. The space can be better visualized using the orthographic camera projection (geomview menu: inpect->cameras). The external circle is the border of the reachable workspace. The two other circles are internal barriers where some configurations lose dexterity. The fact that the beam where to weld is fully included in an area with full dexterity means that the task can be achieved without any concern.
- Move the degrees of freedom to their extreme values to explore the detected borders.
- The workspace boundaries become more complex if there are limitations in the the rotations of the three links forming the robot (this is illustrated in another example).
Jump to the previous example: a 1-dimensional case.
Jump to the next example: a 2-dimensional case.
Definition in file Welding_open.world.
Follow us!