|
universal.world File Reference Detailed Description
Example of how to set a universal joint including range limitations. A universal joint is composed by two coincident revolute joints that form an angle of 90 degrees. The way to encode this joints is defining and implicit reference frame in between the two involved links (named ground and link in the example). The X unitary vector ( The ranges of the universal joint are defined with two vectors, each given by to points:
This example can be processed following the next steps:
After this sequence of commands you will see the motions of two links with repect to each other. Use the slider to move the cylinder. Note that the solutions are not sorted in any way (the sort operation only works for one-dimensional solution sets and here the solution set is 2-dimensional). 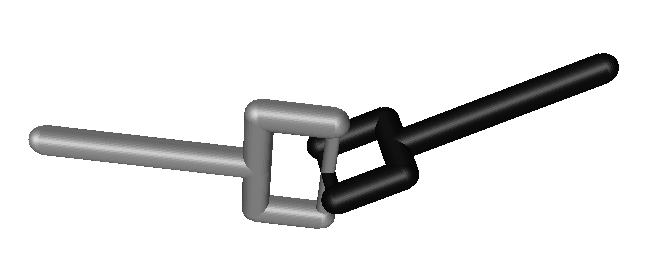
You can also interactively explore the solution set executing:
Use the sliders in the graphical interface to move the cylinder. Definition in file universal.world. |
 in the figure above) is given by points Q1 and P1. The Y unitary vector (
in the figure above) is given by points Q1 and P1. The Y unitary vector (  in the figure above) is given by points Q2 and R2. When the joint is assembled, Q1 and Q2 coincide and vectors Q1-P1 and Q2-P2 are orthogonal.
in the figure above) is given by points Q2 and R2. When the joint is assembled, Q1 and Q2 coincide and vectors Q1-P1 and Q2-P2 are orthogonal.
Follow us!