Research line
Perception and Manipulation

The research of PERCEPTION AND MANIPULATION group focuses on enhancing the perception, learning, and planning capabilities of robots to achieve higher degrees of autonomy and user-friendliness during everyday manipulation tasks. Some topics addressed are the geometric interpretation of perceptual information, construction of 3D object models, action selection and planning, reinforcement learning, and teaching by demonstration. ❯ See our presentation video ❯
Head of line: Carme Torras Genís

Research areas
>> Learning by demonstration
>> Planning for perception and manipulation
>> Perception of rigid and non-rigid objects
Tech. transfer
Our activity finds applications in several fields through collaboration with our technological partners
Facilities
Research projects
We carry out projects from national and international research programmes.
→ More about our research projects
<< Back to Perception and Manipulation main page
Learning by demonstration
We devise methods to learn object-action relations to accomplish tasks at different levels of abstraction, where object models are generated from visual and depth information, and actions, involving manipulation skills, are learned from demonstrations provided by a human using multimodal algorithms that combine vision and haptics.

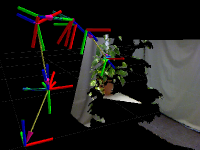
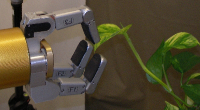
Planning for perception and manipulation
We are interested in view planning for object modeling, as well as manipulation planning, with special interest in deformable objects. High-level task formulations are integrated with low-level geometry-based methods and simplified physical models, together with an on-line sensory-based treatment of uncertainty, so as to come up with specific sequences of motion commands.

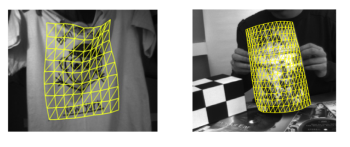
Perception of rigid and non-rigid objects
Our objective is to investigate computer vision algorithms for interpreting and understanding scenes from images, with applications in robotics and medical imaging. In particular, our activities are concentrated on retrieving rigid and non-rigid shape, motion and camera pose from single images and video sequences.
These are the latest research projects of the Perception and Manipulation research line:


-

ALLIES: Artificial inteLLigence In sustainable dEvelopment goalS
European Project
Start Date: 01/01/2024
-

ARISE: Advanced AI and RobotIcS for autonomous task pErformance
European Project
Start Date: 01/01/2024
-

ROMANDIC: RObot MANipulation of Deformables through dynamIC actions
European Project
Start Date: 01/10/2024

-

SoftEnable: Towards Soft Fixture-Based Manipulation Primitives Enabling Safe Robotic Manipulation in Hazardous Healthcare and Food Handling Applications
European Project
Start Date: 01/10/2022
-

SECUROPS: User-centred Security Framework for Social Robots in Public Space
European Project
Start Date: 01/01/2021



-

IPALM: Interactive Perception-Action-Learning for Modelling Objects
European Project
Start Date: 01/10/2019
-

IMAGINE: Robots understanding their actions by imagining their effects
European Project
Start Date: 01/01/2017

-

I-DRESS: Assistive interactive robotic system for support in dressing
European Project
Start Date: 01/12/2015
-

ViSen: Visual Sense, Tagging visual data with semantic descriptions
European Project
Start Date: 01/07/2013
-

IntellAct: Intelligent observation and execution of Actions and manipulations
European Project
Start Date: 01/03/2011

-

PACOPLUS: Perception, action & cognition through learning of object-action complexes.
European Project
Start Date: 01/02/2006
-

PARALIN: Parallel computing modelling for industrial problems
European Project
Start Date: 01/06/1996

-

MOMENTUM: Virtual prototyping for robotic manipulation of garments: enhancing the capabilities of the CLOTHILDE cloth simulator
National Project
Start Date: 20/12/2024
-

GreenVAR: Gestión de sistemas energéticos renovables mediante técnicas de visión artificial y robótica
National Project
Start Date: 07/04/2025
-

AWESOME: Connecting past, present and future: Acquiring and leveraging prior knowledge to unveil the temporal structure of untrimmed videos
National Project
Start Date: 01/09/2024
-

CHLOE-Map: Geometric Coordinates to Navigate the Configuration Space of Cloth-Like Objects for Robotic Manipulation
National Project
Start Date: 01/09/2024
-

GRAvatar: Generating Realistic Avatars in unconstrained environments
National Project
Start Date: 01/09/2024
-

DEMETER 5.0: Sistema digitalizado para la producción sostenible de algodón hidropónico en invernadero
National Project
Start Date: 01/11/2022
-

SMARTGAZE II: Sistema de Movilidad Autónoma y Segura para personas con Baja Visión en entornos urbanos
National Project
Start Date: 01/09/2022
-

CHLOE-GRAPH: ClotH-Like ObjEcts Grasping, Representation, and Action Planning
National Project
Start Date: 01/09/2021

-

DOVE: Digitalización de organismos vivos en movimiento a partir de vídeos casuales
National Project
Start Date: 29/09/2023
-

ROB-IN: Robots para la asistencia continua y personalizada capaces de explicarse a sí mismos
National Project
Start Date: 01/12/2021
-

GREAT: Beyond Graph Neural Networks: Joint graph topology learning and graph-based inference for computer vision
National Project
Start Date: 01/06/2020
-
HuMoUR: Markerless 3D human motion understanding for adaptive robot behavior
National Project
Start Date: 01/01/2018
-

RobInstruct: Instructing robots using natural communication skills
National Project
Start Date: 01/01/2015
-

REST: Computación mediante restricciones en robótica y gestión de recursos
National Project
Start Date: 31/12/1999
-

DeepMax: Ayudas extraordinarias de estrategia de excelencia del proyecto MaX-CSIC 2024
CSIC Project
Start Date: 17/02/2025
-

REDINTER: Oficina de proyectos europeos e internacionales del IRI
CSIC Project
Start Date: 01/01/2024
-
MARE: Manipulación robotizada: Aprendizaje por demostración y Refuerzo
CSIC Project
Start Date: 15/12/2018


-
AECEX 2022: Ayuda extraordinaria a Unidad de Excelencia María de Maeztu 2022
CSIC Project
Start Date: 15/03/2022
-
AECEX: Ayuda extraordinaria a Unidad de Excelencia María de Maeztu
CSIC Project
Start Date: 24/03/2021
-
CONPRERO: NonLinear Predictive Control For Robotic Systems With High Dynamics
CSIC Project
Start Date: 15/01/2021
-
R3OBJ: Reconstrucción 3D, localización y segmentación automática de objetos a partir de imágenes
CSIC Project
Start Date: 22/11/2018



-
CINNOVA: Modelos cinemáticos y técnicas de aprendizaje para robots de estructura innovadora
CSIC Project
Start Date: 01/07/2011
-

MVOD: Medición eficiente de volúmenes de objetos deformables con cámaras rentables
CSIC Project
Start Date: 01/03/2012
-

APREN: Modelos perceptivos y técnicas de aprendizaje para robots de servicios
CSIC Project
Start Date: 01/01/2010
-

BPnP: Priors para la detección 3D en tiempo real de objetos rígidos y deformables
CSIC Project
Start Date: 01/10/2008
-

ROSPIA: Eines per incrementar la capacitat de percepció i interacció d’una plataforma de robots socials a través de models fundacionals
Regional Project
Start Date: 11/06/2024

-
LABORA 2025: Consolidació del Laboratori Obert de Robòtica Assistencial
Regional Project
Start Date: 01/01/2025
-
FRAILWATCH: Sistema de Monitorització Robòtic de la Fragilitat per a Persones Grans
Regional Project
Start Date: 10/11/2023
-

SGR RobIRI: Grup consolidat de Percepció i Manipulació Robotitzada de l'IRI
Regional Project
Start Date: 01/01/2022

-

LABORA 2024: Consolidació del Laboratori Obert de Robòtica Assistencial
Regional Project
Start Date: 01/01/2024
-

LABORA 2023: Consolidació del Laboratori Obert de Robòtica Assistencial
Regional Project
Start Date: 01/01/2023
-

PreLabORA: Posada en marxa del Laboratori Obert de Robòtica Assistencial
Regional Project
Start Date: 01/01/2022
-

SGR RobIRI: Grup consolidat de Percepció i Manipulació Robotitzada de l'IRI
Regional Project
Start Date: 01/01/2017
-

SIMBIOTS: Facilitar una introducció de la robòtica a nous processos i aplicacions dintre de la industria
Regional Project
Start Date: 01/01/2018




-
PYERCING: Open your ears: predicting object material from impact sounds
UPC Project
Start Date: 01/07/2020
-
MP-CloL: Learning Robotic Cloth Manipulation based on Physics Models and Model Predictive Control
UPC Project
Start Date: 01/07/2020
-
SPECTACLE: From Spectators to Actors: Understanding Social Interactions through the Eyes of a Participant
UPC Project
Start Date: 01/10/2019
-
MESSI: Camera Self-Calibration for Structure from Motion on Dynamic Scenarios
UPC Project
Start Date: 01/10/2019
-
iMOVE: Development of a hybrid control interface based on sEMG and movement signals for an assistive robotic manipulator
UPC Project
Start Date: 01/10/2019
-
LatCom: Variable Impedance Control with Movement Primitives in Latent Spaces During Compliant Manipulation
UPC Project
Start Date: 01/01/2019

-
LLULL: Librerías de tratamiento de datos, modelado y exploración de procesos industriales
Technology Transfer Contract
Start Date: 03/07/2019
-
ADMIT: Aplicacions robòtiques fonamentant-nos en dues noves tecnologies facilitadores
Technology Transfer Contract
Start Date: 16/06/2025
-

CATCH: Computer-Assisted Technology for Cotton Crop Health
Technology Transfer Contract
Start Date: 01/03/2025
-
SAFEDYP025: Memoria episódica para la planificación dinámica segura en sistemas autónomos
Technology Transfer Contract
Start Date: 23/06/2025
-
ROGO: Assessorament per la utilització robot manipulador industrial
Technology Transfer Contract
Start Date: 01/10/2024
-

MeFraBotS: Mesura de la fragilitat en robots socials
Technology Transfer Contract
Start Date: 02/11/2023
-
PIONEER: Projecte Innovador OrieNtat a dissEnyar l’atEnció socIosanitària del futur
Technology Transfer Contract
Start Date: 22/11/2023
-
Text4Pose: Leveraging text to improve human pose, shape, motion estimation and generation
Technology Transfer Contract
Start Date: 15/09/2021
-
DeepRender: Deep Neural Rendering for Cinematography
Technology Transfer Contract
Start Date: 15/02/2022
-
DeepSoccer: Deep Learning Technology applied to Soccer Videos
Technology Transfer Contract
Start Date: 20/05/2019
-

Amazon ResearchAward: Geometry-aware 3D Human Body Animation from Still Photos
Technology Transfer Contract
Start Date: 14/03/2019
-
FACEREC3D: Solucions en reconeixement facial robust a atacs de falsificació utilitzant càmeres TOF
Technology Transfer Contract
Start Date: 25/05/2023
-
MAPRICOM: Suport i desenvolupament d'un sistema de manteniment predictiu
Technology Transfer Contract
Start Date: 15/02/2023
-
IMPROFIT: Estimació de la posició del cos humà a partir d’imatges de dispositius mòbils
Technology Transfer Contract
Start Date: 01/10/2021
-
PADEL: Asesoramiento visión por ordenador para partidos de pádel
Technology Transfer Contract
Start Date: 29/06/2021
-
HELIPORTS: Desarrollo de soluciones de visión por computador para la gestión de helipuertos y aeródromos
Technology Transfer Contract
Start Date: 06/05/2021
-
APYUR: Asesoramiento para el análisis y ensayo en el desarrollo de un sistema de visión multi-cámara para identificación de personas
Technology Transfer Contract
Start Date: 26/07/2021
-

Google ResearchAward: GANimation3D: Unsupervised 3D Face Animation from Monocular Images
Technology Transfer Contract
Start Date: 01/10/2019
-
SLD: Proceso automatizado de detección y clasificación inteligente de pieles (smart leather detector)
Technology Transfer Contract
Start Date: 06/03/2018
-
AIPICS: Desarrollo de un sistema integral de control de la producción dotado de inteligencia artificial y capacidad de autodecisión
Technology Transfer Contract
Start Date: 01/01/2018
-
RELAPP: Aplicació electrònica portàtil controlada per una APP per a la mesura in situ de l’elasticitat de materials visco-elàstics
Technology Transfer Contract
Start Date: 19/10/2020
-

SCIACE: Sistema de climatización inteligente auto-adaptativo a las condiciones del entorno
Technology Transfer Contract
Start Date: 15/12/2017
-
3T-SLTE: Grupo tractor para elevadores con gestión inteligente de energía integrada
Technology Transfer Contract
Start Date: 11/03/2015
-
PERSEO: Paquete escalable robusto soluciones específicas orientadas
Technology Transfer Contract
Start Date: 26/05/2016
-

Google Faculty Award: Geometry-aware CNNs for Non-Rigid Shape Reconstruction
Technology Transfer Contract
Start Date: 17/02/2017
-

TERMOSOLD: Desarrollo de un sistema basado en técnicas de inteligencia artificial para la inspección de soldaduras en lineas de envasado horizontal
Technology Transfer Contract
Start Date: 10/03/2015
-

CRISTALBREAD: Investigació de la capacitat de tecnologíes de robotització intel.ligent per a la manipulació de masses de panificació altament hidratades
Technology Transfer Contract
Start Date: 01/03/2015
-

SENECA: Semi-automatic neuron reconstruction in CATMAID
Technology Transfer Contract
Start Date: 01/09/2015
-

SITVIA: Sistema de inspección de tampografía por visión artificial adaptable
Technology Transfer Contract
Start Date: 07/09/2015
-

AutomaticTV: Algorithms for automatic audiovisual production
Technology Transfer Contract
Start Date: 24/10/2014
-

RecycLearn: Desarrollo de tecnología para aprendizaje autónomo de un brazo robótico - Aplicación a plantas de reciclaje.
Technology Transfer Contract
Start Date: 01/09/2013

-

ROBOSOFT: Sistema de visió d'ajuda a la conducció per al vehicle NICOLAS-VTCU
Technology Transfer Contract
Start Date: 23/02/2006
These are the most recent publications (2025 - 2024) of the Perception and Manipulation
-
D.F. Ordoñez, G. Turrisi, V. Kostic, M. Martin, A. Agudo, F. Moreno-Noguer, M. Pontil, C. Semini and C. Mastalli. Morphological symmetries in robotics. International Journal of Robotics Research : 1-24, 2025, to appear.
 Abstract
Abstract
 Info
Info
 PDF
PDF
-
R. Kermenov, S. Foix, J. Borràs, V. Castorani, S. Longhi and A. Bonci. Automating the hand layup process: On the removal of protective films with collaborative robots. Robotics and Computer-Integrated Manufacturing, 93: 102899, 2025, to appear.
Abstract
Info
PDF
-
A. Longhini, Y. Wang, I. Garcia-Camacho, D. Blanco-Mulero, M. Moletta, M.C. Welle, G. Alenyà, H. Yin, Z. Erickson, D. Held, J. Borràs and D. Kragic. Unfolding the literature: a review of robotic cloth manipulation. Annual Review of Control, Robotics, and Autonomous Systems, 8: 295-322, 2025.
Abstract
Info
PDF
-
S. Singhal, R. Pérez, A. Espersen and A. Agudo. Dual-space augmented intrinsic-LoRA for wind turbine segmentation, 2025 IEEE International Conference on Acoustics, Speech and Signal Processing, 2025, Hyderabad, India, pp. 1-5.
Abstract
Info
PDF
-
M. Alberich-Carramiñana, J. Guàrdia, E. Nart, A. Poteaux, J. Roé and M. Weimann. Polynomial factorization over Henselian fields. Foundations of computational mathematics, 2025.
Abstract
Info
PDF
-
N. Vallès and J. Pareto. Artificial intelligence as a mode of ordering. Automated-decision making in primary care. Information, Communication & Society, 2025, to appear.
Abstract
Info
PDF
-
F. Coltraro, J. Borràs, M. Alberich-Carramiñana and C. Torras. Tracking cloth deformation: a novel dataset for closing the sim-to-real gap for robotic cloth manipulation learning. International Journal of Robotics Research , 2025, to appear.
Abstract
Info
PDF
-
G. Capellera, A. Rubio, L. Ferraz and A. Agudo. Unified uncertainty-aware diffusion for multi-agent trajectory modeling, 2025 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2025, Nashville, TN (USA), pp. 22476-22486, to appear.
Abstract
Info
PDF
-
M. Peral, G. Capellera, A. Rubio, L. Ferraz, F. Moreno-Noguer and A. Agudo. Temporally accurate events detection through ball possessor recognition in soccer, 2025 International Conference on Computer Vision Theory and Applications, 2025, Porto, Portugal, pp. 221-231.
Abstract
Info
PDF
-
A. Aryania, R. Huertas, S. Forgas, C. Angulo and G. Alenyà. Effects of privacy warning on the intention to disclose personal information during interaction with a robot in public spaces. International Journal of Social Robotics, 17: 1055–1073, 2025.
Abstract
Info
PDF
-
A. Favata, R. Gallart, L. van Noort, J. Exposito, J. Medina-Cantillo, C. Torras, D. Natera-de Benito, J.M. Font and R. Pàmies-Vilà. Imu-based kinematic analysis to enhance upper limb motor function assessment in neuromuscular diseases. Journal of NeuroEngineering and Rehabilitation, 22(63), 2025.
Abstract
Info
PDF
-
J. Morales, B. Gebregziabher, A. Cabañeros and J. Sanchez. VQA-driven event maps for assistive navigation for people with low vision in urban environments, 2025 IEEE International Conference on Robotics and Automation, 2025, Atlanta, pp. 7, to appear.
Abstract
Info
PDF
-
P. Jiménez and C. Torras. Robots. Una immersió rápida. Volume 26 of Una immersió rápida. Tibidabo Edicions, SA, 2025.
Abstract
Info
-
F. Coltraro, J. Amorós, C. Torras and M. Alberich-Carramiñana. A practical aerodynamic model for dynamic textile manipulation in robotics. Mechanism and Machine Theory, 209(105993), 2025.
Abstract
Info
PDF
-
A. Luque, D. Parent, A. Colomé, C. Ocampo-Martínez and C. Torras. Model predictive control for dynamic cloth manipulation: Parameter learning and experimental validation. IEEE Transactions on Control Systems Technology, 32(4): 1254-1270, 2024.
Abstract
Info
PDF
-
A. Civit, A. Andriella, M. Antonio, C. Javierre, C. Boqué and G. Alenyà. Exploring the potential of a robot-assisted frailty assessment system for elderly care, 33rd IEEE International Symposium on Robot and Human Interactive Communication, 2024, Pasadena, California, USA, pp. 168-175, IEEE.
Abstract
Info
PDF
-
S. Izquierdo. Flexible plan generation, adaptation and execution in human-robot collaboration, 2024 IRI Doctoral Day, 2024, Barcelona, pp. 10.
Abstract
Info
PDF
-
A. Favata, L. van Noort, R. Gallart, J. Exposito, J. Medina-Cantillo, A. Nascimento, D. Natera-de Benito, C. Torras, J.M. Font and R. Pàmies-Vilà. Using upper limb kinematics to refine clinical assessment in neuromuscular disorders, 2024 Annual Meeting of the European Society of Movement Analysis in Adults and Children, 2024, Oslo, pp. 68-69.
Abstract
Info
PDF
-
C. Barrué, A. Suárez, M. Inzitari, A. Ribera and G. Alenyà. NYAM: the role of configurable engagement strategies in robotic-assisted feeding, 2024 ACM/IEEE International Conference on Human-Robot Interaction, 2024, Boulder, CO, USA, pp. 228–232.
Abstract
Info
PDF
-
A. Aryania, R. Huertas, S. Forgas, C. Angulo and G. Alenyà. How do people intend to disclose personal information to a social robot in public spaces?, 33rd IEEE International Symposium on Robot and Human Interactive Communication, 2024, Pasadena, California, USA, pp. 1809-1814, IEEE.
Abstract
Info
PDF
-
T. Love. Fostering human-robot mutual understanding by explaining the internal beliefs, 2024 IRI Doctoral Day, 2024, Barcelona, pp. 11.
Abstract
Info
PDF
-
N. Ugrinovic, T. Lucas, F. Baradel, P. Weinzaepfel, G. Rogez and F. Moreno-Noguer. Purposer: Putting human motion generation in context , 2024 International Conference on 3D Vision, 2024, Davos, Switzerland, pp. 1310-1319.
Abstract
Info
PDF
-
D. Blanco-Mulero, O. Barbany, G. Alcan, A. Colomé, C. Torras and V. Kyrki. Benchmarking the sim-to-real gap in cloth manipulation. IEEE Robotics and Automation Letters, 9(3): 2981-2988, 2024.
Abstract
Info
PDF
-
J. Pareto and M. Coeckelbergh. Social assistive robotics: An ethical and political inquiry through the lens of freedom. International Journal of Social Robotics, 16: 1797–1808, 2024.
Abstract
Info
PDF
-
A. Olivares-Alarcos. Foundations of ontology-based explainable robots, 2024 IRI Doctoral Day, 2024, Barcelona, pp. 13.
Abstract
Info
PDF
-
N. Ugrinovic, B. Pan, G. Pavlakos, D. Paschalidou, B. Shen, J. Sanchez, F. Moreno-Noguer and L. Guibas. MultiPhys: Multi-person physics-aware 3D motion estimation , 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, Seattle, USA, pp. 2331-2340.
Abstract
Info
PDF
-
P. Jiménez. Inside-out states of garments. Technical Report IRI-TR-24-01, Institut de Robòtica i Informàtica Industrial, CSIC-UPC, 2024.
Abstract
Info
PDF
-
J. Pareto and C. Torras. To each technology its own ethics? A reply to Sætra & Danaher (and their critics). Philosophy and Technology, 37: 107, 2024.
Abstract
Info
PDF
-
M. Pérez. Multimodal data fusion for multiple object tracking: a reference perception system for ADAS and AV functions validation, 2024 IRI Doctoral Day, 2024, Barcelona, pp. 14.
Abstract
Info
PDF
-
A. Civit, R. Stower, I. Leite, A. Andriella and G. Alenyà. Robots as mediators to resolve multi-user preference conflicts, 2024 Workshop on Weighing the benefits of autonomous robot personalisation , 2024, Pasadena (CA), USA, pp. 1-5.
Abstract
Info
PDF
-
S. Izquierdo, G. Canal, C. Rizzo and G. Alenyà. PlanCollabNL: leveraging Large Language Models for adaptive plan generation in human-robot collaboration, 2024 IEEE International Conference on Robotics and Automation, 2024, Yokohama (Japan), pp. 17344-17350.
Abstract
Info
PDF
-
N. Ugrinovic, A. Ruiz, A. Agudo, A. Sanfeliu and F. Moreno-Noguer. PIRO: Permutation-invariant relational network for multi-person 3D pose estimation, 19th International Conference on Computer Vision Theory and Applications, 2024, Rome (Italy), pp. 295-305.
Abstract
Info
PDF
-
Y. Tian. Bio-inspired event-driven intelligence for ego-motion estimation, 2024 IRI Doctoral Day, 2024, Barcelona, pp. 18.
Abstract
Info
PDF
-
T. Love, A. Andriella and G. Alenyà. Personalising explanations and explaining personalisation, 2024 Workshop on Weighing the benefits of autonomous robot personalisation , 2024, Pasadena (CA), USA.
Abstract
Info
PDF
-
S. Forgas, R. Huertas, A. Andriella and G. Alenyà. Does the personality of consumers influence the assessment of the experience of interaction with social robots?. International Journal of Social Robotics, 16: 1167-1187, 2024.
Abstract
Info
PDF
-
I. Garcia-Camacho, L. Alberta, M.C. Welle, G. Alenyà, D. Kragic and J. Borràs. Standardization of cloth objects and its relevance in robotic manipulation, 2024 IEEE International Conference on Robotics and Automation, 2024, Yokohama (Japan), pp. 8298-8304.
Abstract
Info
PDF
-
M. Pérez, A. Agudo, G. Dubbelman and P. Jancura. Class prototypical loss for enhanced feature separation in 3D object detection, 2024 IEEE Intelligent Transportation Systems Conference, 2024, Edmonton, Canada, pp. 3505-3512.
Abstract
Info
PDF
-
G. Capellera, L. Ferraz, A. Rubio, A. Agudo and F. Moreno-Noguer. TranSPORTmer: A holistic approach to trajectory understanding in multi-agent sports scenarios, 17th Asian Conference on Computer Vision, 2024, Hanoi, in Computer Vision – ACCV 2024, Vol 15472 of Lecture Notes in Computer Science, pp. 333–352, 2024.
Abstract
Info
PDF
-
G.D. Delmas, P. Weinzaepfel, T. Lucas, F. Moreno-Noguer and G. Rogez. PoseScript: linking 3D human poses and natural language. IEEE Transactions on Pattern Analysis and Machine Intelligence: 1-13, 2024, to appear.
Abstract
Info
PDF
-
E. Corona, G. Alenyà, G. Pons-Moll and F. Moreno-Noguer. LayerNet: high-resolution semantic 3D reconstruction of clothed people. IEEE Transactions on Pattern Analysis and Machine Intelligence, 46(2): 1257-1272, 2024.
Abstract
Info
PDF
-
C. Torras. Presente y futuro de los robots asistenciales: Desafíos tecnocientíficos y éticos. Real Academia de Ingeniería, 2024.
Abstract
Info
PDF
-
M. Fatan, E. Mincato, D. Pintzou and M. Dimiccoli. 3M-Transformer: A multi-stage multi-stream multimodal transformer for embodied turn-taking prediction, 2024 IEEE International Conference on Acoustics, Speech and Signal Processing, 2024, Seoul, Korea, pp. 8050-8054.
Abstract
Info
PDF
-
S. Montoya and A. Agudo. 4DPV: 4D pet from videos by coarse-to-fine non-rigid radiance fields, 17th Asian Conference on Computer Vision, 2024, Hanoi, in Computer Vision – ACCV 2024, Vol 15472 of Lecture Notes in Computer Science, pp. 141–157, 2024.
Abstract
Info
PDF
-
G.D. Delmas, P. Weinzaepfel, F. Moreno-Noguer and G. Rogez. PoseEmbroider: towards a 3D, visual, semantic-aware human pose representation, 18th European Conference on Computer Vision, 2024, Milano, Italy, in Computer Vision – ECCV 2024, Vol 15110 of Lecture Notes in Computer Science, pp. 55-73, 2024.
Abstract
Info
PDF
-
M. Dalmasso, J.E. Domínguez, I.J. Torres, P. Jiménez, A. Garrell Zulueta and A. Sanfeliu. Shared task representation for human–robot collaborative navigation: The collaborative search case. International Journal of Social Robotics, 16: 145-171, 2024.
Abstract
Info
PDF
-
M. Dalmasso, V. Sanchez-Anguix, A. Garrell Zulueta, P. Jiménez and A. Sanfeliu. Exploring Preferences in Human-Robot Navigation Plan Proposal Representation, 2024 ACM/IEEE International Conference on Human-Robot Interaction, 2024, Boulder, CO, USA, pp. 369-373.
Abstract
Info
PDF
-
G. Fiche, S. Leglaive, X. Alameda, A. Agudo and F. Moreno-Noguer. VQ-HPS: Human pose and shape estimation in a vector-quantized latent space, 18th European Conference on Computer Vision, 2024, Milano, Italy, in Computer Vision – ECCV 2024, Vol 15110 of Lecture Notes in Computer Science, pp. 471-490, 2024.
Abstract
Info
PDF
-
E. Hannus, T. Nguyen Le, D. Blanco-Mulero and V. Kyrki. Dynamic manipulation of deformable objects using imitation learning with adaptation to hardware constraints, 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2024, Abu Dhabi, UAE, pp. 12655-12662.
Abstract
Info
PDF
-
M. Alberich-Carramiñana, J. Guàrdia, E. Nart and J. Roé. Valuations with an infinite limit-depth. Communications in Algebra, 52(1): 359-370, 2024.
Abstract
Info
PDF
-
O. Barbany, X. Lin, M. Bastan and A. Dhua. Procsim: Proxy-based confidence for robust similarity learning, 2024 IEEE Winter Conference on Applications of Computer Vision, 2024, Waikoloa, Hawaii, pp. 1297-1306.
Abstract
Info
PDF
-
M. Gutiérrez and A. Agudo. No bells, just whistles: sports field registration by leveraging geometric properties, 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). Workshop on Computer Vision in Sports, 2024, Seattle (USA), pp. 3325-3334.
Abstract
Info
PDF
-
S. Izquierdo, G. Canal, G. Alenyà, C. Rizzo and A. Coles. Planning for human-robot collaboration scenarios with heterogeneous costs and durations, 27th European Conference on Artificial Intelligence, 2024, Santiago de Compostela (Spain), Vol 392 of Frontiers in Artificial Intelligence and Applications, pp. 4410-4417, IOS Press.
Abstract
Info
PDF
-
G. González, A. Martínez, V. Martínez, S. Foix and G. Alenyà. Fast ready-to-harvest cotton detection and classification with YOLOv8 in greenhouse crops, 7th Iberian Robotics Conference, 2024, Madrid, Spain, pp. 1-6.
Abstract
Info
PDF
-
N. Vallès, C. Barrué and G. Alenyà. La heteronomía en los robots sociales asistenciales. Una experiencia piloto con un robot para dar de comer en el hospital, XV Congreso Español de Sociología, 2024, Sevilla.
Abstract
Info
PDF
-
C. Torras. Ethics of social robotics: Individual and societal concerns and opportunities. Annual Review of Control, Robotics, and Autonomous Systems, 7(1): 1-18, 2024.
Abstract
Info
PDF
-
F. Stulp, A. Colomé and C. Torras. Fitting parameters of linear dynamical systems to regularize forcing terms in Dynamical Movement Primitives, 2024 IEEE International Conference on Robotics and Automation, 2024, Yokohama (Japan), pp. 15024-15030.
Abstract
Info
PDF
-
A. Favata, R. Gallart, R. Pàmies-Vilà, C. Torras and J.M. Font. IMU-based systems for upper-limb kinematic analysis in clinical applications: A systematic review. IEEE Sensors Journal, 24(18): 28576-28594, 2024.
Abstract
Info
PDF
-
Y. Tian and J. Andrade-Cetto. SDformerFlow: Spiking neural network transformer for event-based optical flow, 27th International Conference on Pattern Recognition, 2024, Kolkata, in Pattern Recognition, Vol 15315 of Lecture Notes in Computer Science, pp. 475-491, 2024, Cham.
Abstract
Info
PDF
-
C. Escolano, C. Barrué, J. Picas and G. Alenyà. Studying the performance of automatic speech recognition systems on older adults, 2024 IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN). Workshop in Trends in Socially Assistive Robotics: Human-centered Approach, 2024, Pasadena, California, USA.
Abstract
Info
PDF
-
A. Berresheim and A. Agudo. Photovoltaic power forecasting using sky images and sun motion, 2024 IEEE International Conference on Acoustics, Speech and Signal Processing, 2024, Seoul, Korea, pp. 4260-4264.
Abstract
Info
PDF
-
T. Love, A. Andriella and G. Alenyà. What would I do if? Promoting understanding in HRI through real-time explanations in the wild, 33rd IEEE International Symposium on Robot and Human Interactive Communication, 2024, Pasadena, California, USA, pp. 504-509, IEEE.
Abstract
Info
PDF
-
A. Olivares-Alarcos, S. Foix, J. Borràs, G. Canal and G. Alenyà. Ontological modeling and reasoning for comparison and contrastive narration of robot plans, 23rd International Conference on Autonomous Agents and Multiagent Systems, 2024, Auckland (New Zealand), pp. 2405-2407.
Abstract
Info
PDF
-
E.B. Bueno Benito and M. Dimiccoli. 2by2: weakly-supervised learning for global action segmentation, 27th International Conference on Pattern Recognition, 2024, Kolkata, in Pattern Recognition, Vol 15315 of Lecture Notes in Computer Science, pp. 380-395, 2024, Cham.
Abstract
Info
PDF
-
A. Rossi, P. Holthaus, S. Moros, G. Lakatos, A. Andriella, M. Scheunemann and A. Van Maris. Trust, acceptance and social cues in human-robot interaction (SCRITA)(Editorial). International Journal of Social Robotics, 16: 1047-1048, 2024.
Abstract
Info
PDF
-
A. Civit, A. Andriella, C. Barrué, M. Antonio, C. Boqué and G. Alenyà. Introducing social robots to assess frailty in older adults, 2024 ACM/IEEE International Conference on Human-Robot Interaction, 2024, Boulder, CO, USA, pp. 342–346.
Abstract
Info
PDF
-
R. Pérez, A. Espersen and A. Agudo. Generalized nested latent variable models for lossy coding applied to wind turbine scenarios, 2024 IEEE International Conference on Image Processing, 2024, Abu Dhabi, UAE, pp. 1947-1953.
Abstract
Info
PDF
-
A. Favata, L. van Noort, R. Gallart, J. Exposito, J. Medina-Cantillo, A. Nascimento, C. Torras, D. Natera-de Benito, J.M. Font and R. Pàmies-Vilà. ArmTracker: Augmenting clinical assessment in neuromuscular diseases by means of advanced motion analysis, 2024 Congreso Internacional Duchenne Parent Project España, 2024, Madrid, pp. 1.
Abstract
Info
PDF
-
J.A. Delgado-Guerrero, A. Colomé, S. Foix and C. Torras. Safety methods for Cartesian control of redundant robotic arms, 7th Iberian Robotics Conference, 2024, Madrid, Spain, pp. 1-7.
Abstract
Info
PDF
-
J. Laplaza, F. Moreno-Noguer and A. Sanfeliu. Enhancing robotic collaborative tasks through contextual human motion prediction and intention inference. International Journal of Social Robotics: 1-20, 2024, to appear.
Abstract
Info
PDF
-
G. Tzelepis, A. Eren Erdal, J. Borràs and G. Alenyà. Semantic state estimation in robot cloth manipulations using domain adaptation from human demonstrations, 19th International Conference on Computer Vision Theory and Applications, 2024, Rome (Italy), pp. 172-182.
Abstract
Info
PDF
-
O. Barbany, M. Huang, X. Zhu and A. Dhua. Leveraging large language models for multimodal search, 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, 2024, Seattle (USA), pp. 1201-1210.
Abstract
Info
PDF
-
J. Exposito, A. Favata, R. Gallart, J. Medina-Cantillo, L. Carrera, A. Nascimento, R. Pàmies-Vilà, C. Torras, J.M. Font and D. Natera-de Benito. Biomarcadores digitales prometedores para medir la función motora de extremidad superior en distrofia muscular de Duchenne, 2024 Reunión Anual de la Sociedad Española de Neurología Pediátrica, 2024, Valladolid, pp. 19.
Abstract
Info
PDF
-
G. Tapia, A. Colomé and C. Torras. Unsupervised trajectory segmentation and gesture recognition through curvature analysis and the Levenshtein distance, 7th Iberian Robotics Conference, 2024, Madrid, Spain, pp. 1-8.
Abstract
Info
PDF
-
A.F. Budria, A. López, O. Lorente and F. Moreno-Noguer. InstantGeoAvatar: Effective geometry and appearance modeling of animatable avatars from monocular video, 17th Asian Conference on Computer Vision, 2024, Hanoi, in Computer Vision – ACCV 2024, Vol 15472 of Lecture Notes in Computer Science, pp. 255-277, 2024.
Abstract
Info
PDF
-
A. Canela, P. Caselles, I. Malik, E. Ramon, J. García, J. Sanchez, G. Triginer and F. Moreno-Noguer. InstantAvatar efficient 3D head reconstruction via surface rendering, 2024 International Conference on 3D Vision, 2024, Davos, Switzerland, pp. 995-1005.
Abstract
Info
PDF
-
O. Barbany, A. Colomé and C. Torras. Deformable surface reconstruction via Riemannian metric preservation. Computer Vision and Image Understanding, 249: 104155, 2024.
Abstract
Info
PDF
-
A. Civit. Multi-user multi-objective personalization in robotic-assisted tasks, 2024 IRI Doctoral Day, 2024, Barcelona, pp. 5.
Abstract
Info
PDF
-
L.M. Lach, R. Haschke, D. Tateo, J. Peters, H. Ritter, J. Borràs and C. Torras. Zero-shot transfer of a tactile-based continuous force control policy from simulation to robot, 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2024, Abu Dhabi, UAE, pp. 725-732.
Abstract
Info
PDF
-
C. Lázaro and C. Angulo. Iterative application of UMAP-based algorithms for fully synthetic healthcare tabular data generation . Algorithms, 17(12): 591, 2024.
Abstract
Info
PDF
-
F. Coltraro, J. Amorós, M. Alberich-Carramiñana and C. Torras. A novel collision model for inextensible textiles and its experimental validation. Applied Mathematical Modelling, 128: 287-308, 2024.
Abstract
Info
PDF
-
A. Casanova and A. Agudo. Uncalibrated and unsupervised photometric stereo with piecewise regularizer, 2024 IEEE International Conference on Image Processing, 2024, Abu Dhabi, UAE, pp. 3471-3476.
Abstract
Info
PDF
-
I. Garcia-Camacho. Benchmarks for garment manipulation, 2024 IRI Doctoral Day, 2024, Barcelona, pp. 7.
Abstract
Info
PDF
-
A. Favata, L. van Noort, R. Gallart, J. Exposito, A. Nascimento, J. Medina-Cantillo, C. Torras, D. Natera-de Benito, J.M. Font and R. Pàmies-Vilà. Enhancing clinical assessment in children with neuromuscular diseases with kinematic parameterization: a one-year follow-up, 2024 Reunión del Capítulo Español de la Sociedad Europea de Biomecánica, 2024, Pamplona, pp. 43.
Abstract
Info
PDF
-
C. Torras. Robots in healthcare: Interdisciplinary co-design and technoethics education, RP2024 Robophilosophy Conference, 2024, Aarhus (Denmark), in Social Robots with AI: Prospects, Risks, and Responsible Methods. Proceedings of Robophilosophy 2024, Vol 397 of Frontiers in Artificial Intelligence and Applications, pp. 15-16, 2024, IOS Press, London.
Abstract
Info
PDF
-
T. Love, A. Andriella and G. Alenyà. Towards explainable proactive robot interactions for groups of people in unstructured environments, 2024 ACM/IEEE International Conference on Human-Robot Interaction, 2024, Boulder, CO, USA, pp. 697–701.
Abstract
Info
PDF
-
G. Capellera, L. Ferraz, A. Rubio, A. Agudo and F. Moreno-Noguer. FootBots: A transformer-based architecture for motion prediction in soccer, 2024 IEEE International Conference on Image Processing, 2024, Abu Dhabi, UAE, pp. 2313-2319.
Abstract
Info
PDF
-
M. Gutiérrez. No bells, just whistles: sports field registration by leveraging geometric properties, 2024 IRI Doctoral Day, 2024, Barcelona, pp. 9.
Abstract
Info
PDF
-
D. Natera-de Benito, A. Favata, J. Exposito, R. Gallart, O. Moya, S. Roca, A. Marzabal, L. van Noort, C. Torras, A. Nascimento, J. Medina-Cantillo, R. Pàmies-Vilà and J.M. Font. Advancing upper limb motor function evaluation in DMD and SMA via kinematic parameterization with the wearable device , 2024 Annual Congress of the World Muscle Society, 2024, Prague, pp. 14.
Abstract
Info
PDF
Perception and Manipulation Laboratory
The Perception and Manipulation Laboratory is the main facility devoted to experimentation on the topics of the research line. It occupies 142 m² in the second floor of the Faculty, and a large part hosts a life-scale mock-up of a (quite) small apartment (35 m²). Two PAL one-armed mobile TIAGo robots dwell within the apartment, but are occasionally taken out for experimentation elsewhere. There is also a manipulation area equipped with two WAM robot arms and a KINOVA manipulator, and workplaces are distributed along the perimeter. Next to the laboratory, with a direct view through a window, there is the Scientific and Technical Lab support office.
The Laboratory is further equipped with commercial and self-developed grippers, sensing devices, and augmented reality appliances. Laboratory service offers quick experimental setup, several standardized software tools, and expertise in robot control and perception algorithms. It also hosted the Humanoids Lab Initiative in the past, and we still keep 15 small humanoid robots for educational or promotional purposes.


Researchers
-
Agudo Martínez, Antonio
 aagudo (at) iri.upc.edu
aagudo (at) iri.upc.edu
-
Alberich Carramiñana, Maria
alberich (at) iri.upc.edu
-
Alenyà Ribas, Guillem
galenya (at) iri.upc.edu
-
Andriella, Antonio
aandriella (at) iri.upc.edu
-
Angulo Bahon, Cecilio
cangulo (at) iri.upc.edu
-
Barrué Subirana, Cristian
cbarrue (at) iri.upc.edu
-
Bernard, Bayle
bbayle (at) iri.upc.edu
-
Blanco Mulero, David
dblancom (at) iri.upc.edu
-
Borràs Sol, Júlia
jborras (at) iri.upc.edu
-
Colomé Figueras, Adrià
acolome (at) iri.upc.edu
-
Coltraro, Franco
fcoltraro (at) iri.upc.edu
-
Dimiccoli, Mariella
mdimiccoli (at) iri.upc.edu
-
Foix Salmerón, Sergi
sfoix (at) iri.upc.edu
-
Jiménez Schlegl, Pablo
jimenez (at) iri.upc.edu
-
Olivares Alarcos, Alberto
aolivares (at) iri.upc.edu
-
Pareto Boada, Júlia
jpareto (at) iri.upc.edu
-
Sanchez Riera, Jordi
jsanchez (at) iri.upc.edu
-
Tian, Yi
ytian (at) iri.upc.edu
-
Torras Genís, Carme
torras (at) iri.upc.edu
PhD Students
-
Barbany Mayor, Oriol
obarbany (at) iri.upc.edu
-
Bermejo Gil, Víctor
vbermejo (at) iri.upc.edu
-
Bueno Benito, Elena Belén
ebueno (at) iri.upc.edu
-
Canela Jiménez, Antonio
acanela (at) iri.upc.edu
-
Capellera Font, Guillem
gcapellera (at) iri.upc.edu
-
Chen, Zhijin
zchen (at) iri.upc.edu
-
Civit Bertran, Aniol
acivit (at) iri.upc.edu
-
Dadgostar, Mahed
mdadgostar (at) iri.upc.edu
-
Delgado Guerrero, Juan Antonio
jdelgado (at) iri.upc.edu
-
Gallart Agut, Roger
rgallart (at) iri.upc.edu
-
Garcia Camacho, Irene
igarcia (at) iri.upc.edu
-
Guda, Harsha Vardhan
hguda (at) iri.upc.edu
-
Gutiérrez Pérez, Marc
mgutierrez (at) iri.upc.edu
-
Izquierdo Badiola, Silvia
sizquierdo (at) iri.upc.edu
-
Jiménez Ayguadé, Oriol
ojimenez (at) iri.upc.edu
-
Kamat, Jay Prabodh
jkamat (at) iri.upc.edu
-
Love, Tamlin
tlove (at) iri.upc.edu
-
Malik Ara, Ibrar
imalik (at) iri.upc.edu
-
Mazzucchelli, Alessio
amazzucchelli (at) iri.upc.edu
-
Peral Sánchez, Marc
mperal (at) iri.upc.edu
-
Pérez Quintana, Marc
mperez (at) iri.upc.edu
-
Pramanick, Pradip
ppramanick (at) iri.upc.edu
-
Tzelepis, Georgios
gtzelepis (at) iri.upc.edu
Master Students
-
Domènech Olivé, Anna
adomenech (at) iri.upc.edu
-
Galliera, Nicola
ngalliera (at) iri.upc.edu
-
Grigoryan, Grigor
ggrigoryan (at) iri.upc.edu
-
Guzmán Castellana, Manel
mguzman (at) iri.upc.edu
-
Martínez Fernández, Antonio
amartinezf (at) iri.upc.edu
-
Salort Benejam, Laura
lsalort (at) iri.upc.edu
-
Zivkovic, Grgur
gzivkovic (at) iri.upc.edu
TFG Students
-
Geta, Rayane
rgeta (at) iri.upc.edu
-
Vilajoana Martín, Maria
mvilajosana (at) iri.upc.edu
Support Staff
-
Gobern Torres, Robert
rgobern (at) iri.upc.edu
-
Gonzalez Gudiño, Luis
lgudino (at) iri.upc.edu
-
González Valdivia, Guillem
ggonzalez (at) iri.upc.edu
-
Lach, Luca Michael
llach (at) iri.upc.edu
-
López Rodríguez, Adrián
alopezro (at) iri.upc.edu
-
Macsai, Daniel
dmacsai (at) iri.upc.edu
-
Oriol Lladó, Jaume
joriol (at) iri.upc.edu
-
Valls Cifre, Antoni
avallsc (at) iri.upc.edu


Follow us!