Technology Transfer Project
IDAHO: Kinematic synthesis for scalable finger/thumb exoskeleton robot
Type
Technology Transfer Contract
Start Date
12/03/2010
End Date
28/02/2011
Staff
Project Description
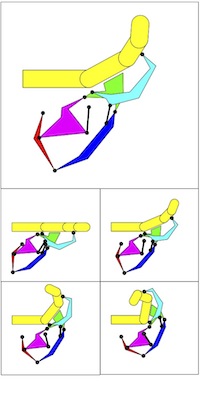
This project is a subaward from a University of Idaho/University of California, Irvine NIH grant. The goal is to design an exoskeleton-like robotic device to assist in tasks of finger and thumb rehabilitation.
The exoskeleton will be designed using visual hand data as input. The mechanisms corresponding to fingers and thumb have different structure: for the finger, a simpler one-degree-of-freedom closed linkage is the preliminary candidate, while for the thumb the robot is expected to have complex spatial motion, accomplished through an overconstrained linkage.
In addition to the dimensional kinematic synthesis, the solution is to be optimized based on a series of constraints for size, space occupation and mechanical advantage, among others.


Follow us!