Research Project
SPLAM: Desarrollo de algoritmos de SPLAM para robótica móvil
Type
CSIC Project
Start Date
01/08/2007
End Date
31/12/2008
Staff
-
-
Grosch, Patrick John
Support
Project Description
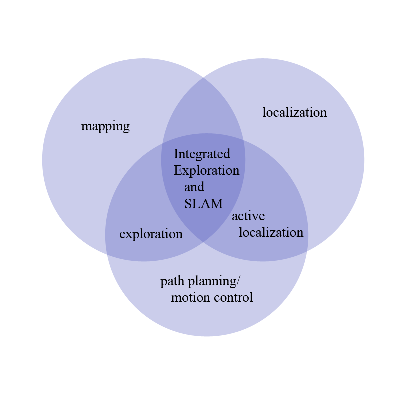
Combining path planning and localization begets active localization, where a robot will take actions to maximize its localizability. Combining mapping and path planning, a robot explores its world so a secondary goal is achieved (distance, time, coverage). Combining mapping and localization, a robot simultaneously estimates its position and the map by simultaneous localization and mapping (SLAM). The approach explored in this project is at the intersection of all three of these sets and is called the simultaneous planning, localization, and mapping (SPLAM) problem, where the robot will jointly take actions to make the best map possible as well as estimate its pose and the map.
The methodology we aim to apply is based in C-PERSEUS, a continuous state partially observable Markov decision processes (POMDPs) planner previously developed in the group.


Follow us!