Technology Transfer Project
ROBOSOFT II: Computer vision algorithms
Type
Technology Transfer Contract
Start Date
24/07/2006
End Date
24/01/2007
Staff
-
-
Alenyà, Guillem
Researcher
Project Description
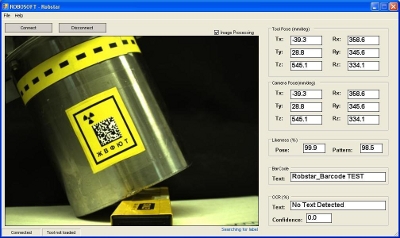
Cal desenvolupar els algorismes de visió per una aplicació de robòtica mòbil, on el robot va equipat amb un braç que a la vegada suporta una càmera prop del canell. El sistema de visió ha de reconèixer uns objectes concrets en l'espai de treball del robot i proporcionar la distància relativa entre braç i objecte. L'objectiu és assitir l'operador en la manipulació i transport dels objectes.


Follow us!