Technology Transfer Project
AIN-IRI: Detección de obstáculos para robots aéreos por medio de técnicas ópticas
Type
Technology Transfer Contract
Start Date
01/02/2010
End Date
30/06/2012
Staff
-
-
Valencia, Rafael
Researcher
-
Alenyà, Guillem
Researcher
-
Ortega, Agustin Alberto
PhD Student
-
Moreno, Francesc
Member
Project Description
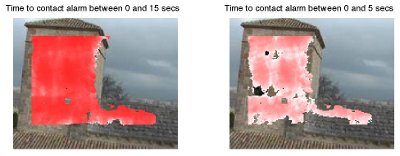
En este proyecto se desarrollan técnicas para computar el tiempo de contacto, o el tiempo a la colisión, para vehículos aéreos no tripulados mediante el análisis de secuencias de vídeo.
 Abstract
Abstract Info
Info

Follow us!