Research Project
Robot-Int-Coop: Robot-Human Interaction, Cooperation and Learning in Urban Areas
Type
National Project
Start Date
01/01/2014
End Date
30/06/2017
Project Code
DPI2013-42458-P
Staff
-
-
Alquézar, Renato
Researcher
-
Garrell, Anaís
Researcher
-
Bolea, Yolanda
Member
-
Huerta, Iván
Member
-
Ferrer, Gonzalo
Member
-
Serratosa, Francesc
Member
-
Grau, Antoni
Member
-
Goldhoorn, Alex
Member
Project Description
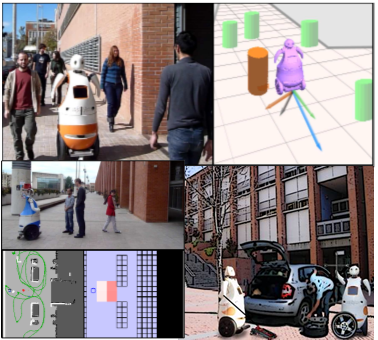
In a near future, social robots will help humans in everyday tasks and they will interact and cooperate with humans in dynamic indoor or outdoor environments. We will find these types of robots in urban areas, building and private houses.
The main goal of this project is to advance in the design of mobile and flying robots that can interact, learn and cooperate with people for urban tasks, adapting themselves to the environment and changing conditions. Specifically we propose to develop new perception techniques for robots based on learning and adaptation, to incorporate visual-servoing techniques for the interaction between humans-robots, to explore new interaction techniques between mobile-aerial robots with humans and to develop new cooperation techniques which facilitate the execution of urban tasks in for example, coordinate navigation, environment exploration or search for objects or persons in an urban site. We will follow the open research lines of the previous R&D projects RoboTaskCoop (DPI2010-17112) and Consolider Ingenio 2012 MIPRCV (CSD2007-00018) about on line learning and adaptation from the video camera and range laser signals of objects, persons and human activities. We will work in the following objectives:
1. Development of learning, adaptive and classification techniques oriented to human-robot interaction. Specifically we want to develop new techniques to identify people and objects which the robot has to interact, based on on-line learning and active learning.
2. Development of a flying robot to do interaction with humans. We will design a light flying robot which will be used to interact with people, using cameras, GPS and other sensors. The flying robot will be able to hover over the people and communicate with them to do urban tasks.
3. New fundamental techniques of human-robot interaction in urban areas. We will continue developing fundamental techniques for doing “hide & seek”, guiding, searching and exploring.
4. New cooperative techniques between robots and humans in urban areas. We will develop the aforementioned techniques between several robots and humans, in order to find new ways that the robots can help humans in urban areas.
5. Real life experiments between robots and humans. We will do experiments in guiding, accompany, searching and exploring.
We will use our IRI robots, the humanoids Tibi and Dabo and we will buy a new aerial robot to study the interaction between aerial robots and humans. The new techniques will be tested in indoor scenarios and in the outdoor scenario Barcelona Robot Lab (BRL) at the UPC.
Project Publications
Journal Publications
-
A. Goldhoorn, A. Garrell Zulueta, R. Alquézar Mancho and A. Sanfeliu. Searching and tracking people with cooperative mobile robots. Autonomous Robots, 42(4): 739-759, 2018.
 Abstract
Abstract
 Info
Info
 PDF
PDF
-
M. Villamizar, A. Garrell Zulueta, A. Sanfeliu and F. Moreno-Noguer. Random clustering ferns for multimodal object recognition. Neural Computing and Applications, 28(9): 2445-2460, 2017.
Abstract
Info
PDF
-
A. Garrell Zulueta, M. Villamizar, F. Moreno-Noguer and A. Sanfeliu. Teaching robot’s proactive behavior using human assistance. International Journal of Social Robotics, 9(2): 231-249, 2017.
Abstract
Info
PDF
-
A. Goldhoorn, A. Garrell Zulueta, R. Alquézar Mancho and A. Sanfeliu. Searching and tracking people in urban environments with static and dynamic obstacles. Robotics and Autonomous Systems, 98: 147-157, 2017.
Abstract
Info
PDF
-
M. Villamizar, A. Garrell Zulueta, A. Sanfeliu and F. Moreno-Noguer. Interactive multiple object learning with scanty human supervision. Computer Vision and Image Understanding, 149: 51-64, 2016.
Abstract
Info
PDF
-
Y. Bolea, A. Grau and A. Sanfeliu. From research to teaching: Integrating social robotics in engineering degrees. International Journal of Computer, Electrical, Automation, Control and Information Engineering, 10(6): 1020-1023, 2016.
Abstract
Info
PDF
-
G. Sanromà, A. Penate-Sanchez, R. Alquézar Mancho, F. Serratosa, F. Moreno-Noguer, J. Andrade-Cetto and M.A. González. MSClique: Multiple structure discovery through the maximum weighted clique problem. PLOS One, 11(1): e0145846, 2016.
Abstract
Info
PDF
-
M. Igelmo and A. Sanfeliu. Filtering graphs to check isomorphism and extracting mapping by using the conductance electrical model. Pattern Recognition, 58: 68-82, 2016.
Abstract
Info
PDF
-
I. Huerta, M. Pedersoli, J. Gonzàlez and A. Sanfeliu. Combining where and what in change detection for unsupervised foreground learning in surveillance. Pattern Recognition, 48(3): 709-719, 2015.
Abstract
Info
PDF
-
I. Huerta, M.B. Holte, T. Moeslund and J. Gonzàlez. Chromatic shadow detection and tracking for moving foreground segmentation. Image and Vision Computing, 41: 42–53, 2015.
Abstract
Info
PDF
Conference Publications
-
A. Pumarola, A. Vakhitov, A. Agudo, A. Sanfeliu and F. Moreno-Noguer. PL-SLAM: Real-time monocular visual SLAM with points and lines, 2017 IEEE International Conference on Robotics and Automation, 2017, Singapore, pp. 4503-4508.
Abstract
Info
PDF
-
E. Repiso, G. Ferrer and A. Sanfeliu. On-line adaptive side-by-side human robot companion in dynamic urban environments, 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2017, Vancouver, Canada, pp. 872-877.
Abstract
Info
PDF
-
A. Amor, A. Santamaria-Navarro, F. Herrero, A. Ruiz and A. Sanfeliu. Planar P∅P: feature-less pose estimation with applications in UAV localization, 2016 IEEE International Symposium on Safety, Security and Rescue Robotics, 2016, Lausanne, pp. 15-20.
Abstract
Info
PDF
-
I. Alzugaray and A. Sanfeliu. Learning the hidden human knowledge of UAV pilots when navigating in a cluttered environment for improving path planning, 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2016, Daejeon, Korea, pp. 1589-1594.
Abstract
Info
PDF
-
A. Grau, Y. Bolea and A. Sanfeliu. Solutions to reduce CO2 emissions for autonomous robotics, 18th International Conference on Computer and Automation Technology, 2016, Zurich, pp. 1173-1176.
Abstract
Info
PDF
-
A. Rubio, M. Villamizar, L. Ferraz, A. Penate-Sanchez, A. Ramisa, E. Simo-Serra, A. Sanfeliu and F. Moreno-Noguer. Efficient monocular pose estimation for complex 3D models, 2015 IEEE International Conference on Robotics and Automation, 2015, Seattle, WA, USA, pp. 1397-1402.
Abstract
Info
PDF
-
M. Villamizar, A. Garrell Zulueta, A. Sanfeliu and F. Moreno-Noguer. Modeling robot's world with minimal effort, 2015 IEEE International Conference on Robotics and Automation, 2015, Seattle, WA, USA, pp. 4890-4896.
Abstract
Info
PDF
-
M. Villamizar, A. Garrell Zulueta, A. Sanfeliu and F. Moreno-Noguer. Multimodal object recognition using random clustering trees, 7th Iberian Conference on Pattern Recognition and Image Analysis, 2015, Santiago de Compostela, in Pattern Recognition and Image Analysis, Vol 9117 of Lecture Notes in Computer Science, pp. 496-504, 2015, Springer.
Abstract
Info
PDF
-
V. Vaquero, M. Villamizar and A. Sanfeliu. Real time people detection combining appearance and depth image spaces using boosted random ferns, 2nd Iberian Robotics Conference, 2015, Lisbon, in Robot 2015: Second Iberian Robotics Conference, Vol 418 of Advances in Intelligent Systems and Computing, pp. 587–598, 2015, Springer.
Abstract
Info
PDF
-
V. Vaquero, E. Repiso, A. Sanfeliu, J. Vissers and M. Kwakkernaat. Low cost, robust and real time system for detecting and tracking moving objects to automate cargo handling in port terminals, 2nd Iberian Robotics Conference, 2015, Lisbon, in Robot 2015: Second Iberian Robotics Conference, Vol 418 of Advances in Intelligent Systems and Computing, pp. 491–502, 2015, Springer.
Abstract
Info
PDF
-
D. Escudero and R. Alquézar Mancho. Distance-based kernels for dynamical movement primitives, 18th Catalan Conference on Artificial Intelligence, 2015, Valencia, in Artificial Intelligence Research and Development, Vol 277 of Frontiers in Artificial Intelligence and Applications, pp. 133-142, 2015, IOS Press.
Abstract
Info
PDF
-
A. Goldhoorn, A. Garrell Zulueta, R. Alquézar Mancho and A. Sanfeliu. Continuous real time POMCP to find-and-follow people by a humanoid service robot, 2014 IEEE-RAS International Conference on Humanoid Robots, 2014, Madrid, Spain, pp. 741-747, IEEE Press.
Abstract
Info
PDF


Follow us!