Research Project
REST: Computación mediante restricciones en robótica y gestión de recursos
Type
National Project
Start Date
31/12/1999
End Date
31/12/2002
Project Code
TAP99-1086-C03-01
Staff
-
-
Thomas, Federico
Researcher
-
Porta, Josep Maria
Researcher
-
Ros, Lluís
Researcher
-
Jiménez, Pablo
Researcher
-
Cembrano, Gabriela
Researcher
-
Serra, Marta
Support
-
Riera, Jordi
Member
-
Creemers, Tom
Member
Project Description
Several companies from very different sectors have come to us with problems having a common feature: the need to deal with nonhomogeneous constraints. Techniques developed in the fields of Numerical Analysis and Operations Research require, in general, that the constraints be homogeneous. On the contrary, Artificial Intelligence techniques process constraints in a symbolic way, thus allowing to address the above type of problems. Those techniques fall into four groups: heuristic search, logic programming, temporal reasoning, and interval analysis. Members of the research team have expertise in each of these groups of techniques.
The current project will tackle four applications involving nonhomogeneous constraints: the management and control of operations in distribution networks, scheduling, routing in a multi-vehicle setting, and mechanical design based on kinematic constraints. From the analysis of these applications, the most suitable combination of techniques to deal with each of them, as well as the required extensions to the basic techniques, will be determined. Some of the envisaged extensions are: the processing of n-ary constraints, symmetry exploitation, the introduction of duration constraints, and the dynamization of algorithms to permit adding constraints on line.
Project Publications
Journal Publications
-
P. Jiménez and C. Torras. Reducing feasible contacts between polyhedral models to red-blue intersections on the sphere. Computer-aided Design, 35(7): 693-705, 2003.
 Abstract
Abstract
 Info
Info
-
F. Thomas and C. Torras. A projectively invariant intersection test for polyhedra. The Visual Computer, 18(7): 405-414, 2002.
Abstract
Info
 PDF
PDF
-
C. Torras. Neural computing increases robot adaptivity. Natural Computing, 1(4): 391-425, 2002.
Abstract
Info
PDF
-
L. Ros and F. Thomas. Overcoming superstrictness in line drawing interpretation. IEEE Transactions on Pattern Analysis and Machine Intelligence, 24(4): 456-466, 2002.
Abstract
Info
PDF
-
V. Ruiz de Angulo and C. Torras. Architecture-independent approximation of functions. Neural Computation, 13(5): 1119-1135, 2001.
Abstract
Info
PDF
-
P. Jiménez, F. Thomas and C. Torras. 3D collision detection: a survey. Computers & Graphics, 25(2): 269-285, 2001.
Abstract
Info
PDF
-
P. Jiménez and C. Torras. An orientation-based pruning tool to speed up contact determination between translating polyhedral models. The International Journal of Robotics Research, 20(6): 466-483, 2001.
Abstract
Info
PDF
-
P. Meseguer and C. Torras. Exploiting symmetries within constraint satisfaction search. Artificial Intelligence, 129(1): 133-163, 2001.
Abstract
Info
PDF
-
P. Bofill and C. Torras. Neural cost functions and search strategies for the generation of block designs: an experimental evaluation. International Journal of Neural Systems, 11(2): 187-202, 2001.
Abstract
Info
PDF
-
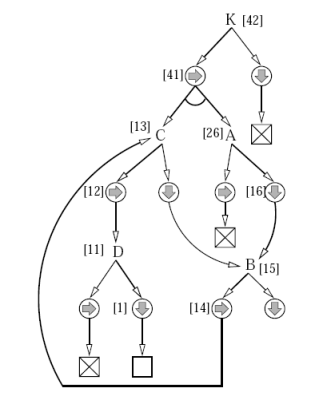
P. Jiménez and C. Torras. An efficient algorithm for searching implicit AND/OR graphs with cycles. Artificial Intelligence, 124(1): 1-30, 2000.
Abstract
Info
PDF
Conference Publications
-
V. Ruiz de Angulo and C. Torras. Learning inverse kinematics via cross-point function decomposition, 2002 International Conference on Artificial Neural Networks, 2002, Madrid, Spain, in Artificial Neural Networks, Vol 2415 of Lecture Notes in Computer Science, pp. 856-861, 2002, Springer, Heidelberg, Alemanya.
Abstract
Info
PDF
-
C. Bombín, L. Ros and F. Thomas. On the computation of the direct kinematics of parallel spherical mechanisms using Bernstein polynomials, 2001 IEEE International Conference on Robotics and Automation, 2001, Seoul, South Korea, pp. 3332-3337, IEEE.
Abstract
Info
PDF


Follow us!