Technology Transfer Project
VALTEC: Sistema de muntatge de robots paral.lels
Type
Technology Transfer Contract
Start Date
30/10/2008
End Date
30/10/2011
Staff
-
-
Grosch, Patrick John
Researcher
-
Borràs, Júlia
Researcher
-
Rull, Aleix
PhD Student
-
Camps, Josep
Student
-
Ambros, Albert
Student
-
Hernández, Sergi
Member
Project Description
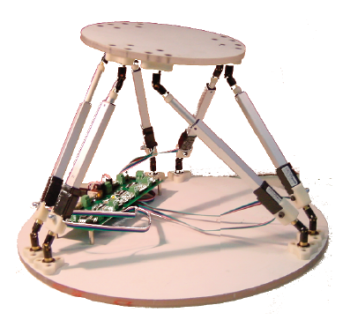
L’objectiu d'aquest project és construir un sistema de peces, tipus kit, per a desenvolupar robots paral·lels de manera que es puguin representar diverses arquitectures diferents, es puguin muntar ràpidament i no requereixin alta formació de personal. El producte a obtenir consisteix en una sèrie de peces elementals, incloses juntes de rotació, juntes prismàtiques, paral·lelograms, juntes universals, ròtules esfèriques, plataformes, motors i sensors. Aquestes peces han de poder ser configurades en diverses arquitectures diferents que serveixin per a modelitzar robots paral·lels que es controlen per mitjà informàtic i dels quals se’n pot analitzar el comportament.
Project Publications
Journal Publications
-
N. Rojas and F. Thomas. Distance-based position analysis of the three seven-link Assur kinematic chains. Mechanism and Machine Theory, 46(2): 112-126, 2011.
 Abstract
Abstract
 Info
Info
 PDF
PDF
-
N. Rojas and F. Thomas. Closed-form solution to the position analysis of Watt–Baranov trusses using the bilateration method. Journal of Mechanisms and Robotics, 3(3): 1-10, 2011.
Abstract
Info
PDF
-
P. Grosch, R. Di Gregorio and F. Thomas. Generation of under-actuated manipulators with non-holonomic joints from ordinary manipulators. Journal of Mechanisms and Robotics, 2(1): 11005-11012, 2010.
Abstract
Info
PDF
Conference Publications
-
J. Borràs, F. Thomas and C. Torras. New geometric approaches to the singularity analysis of parallel platforms, 2011 Workshop de Robótica Experimental, 2011, Seville, pp. 173-180.
Abstract
Info
PDF
-
J. Borràs, F. Thomas and C. Torras. Singularity-invariant leg rearrangements in doubly-planar Stewart-Gough platforms, VI Robotics: Science and Systems Conference, 2010, Zaragoza, Spain, pp. 1-8.
Abstract
Info
PDF
-
P. Grosch, R. Di Gregorio and F. Thomas. A one-motor full-mobility 6-PUS manipulator, 18th CISM-IFToMM Symposium on Robot Design, Dynamics and Control, 2010, Udine, Italy, in ROMANSY 18 Robot Design, Dynamics and Control, Vol 524 of CSIM Courses and Lectures, pp. 49-56, 2010, Springer, Wien / New York.
Abstract
Info
PDF
-
P. Grosch, R. Di Gregorio, J. Lopez and F. Thomas. Motion planning for a novel reconfigurable parallel manipulator with lockable revolute joints, 2010 IEEE International Conference on Robotics and Automation, 2010, Anchorage, AK, USA, pp. 4697-4702.
Abstract
Info
PDF


Follow us!