Research Project
GAUSS: Galileo-EGNOS as an asset for UTM safety and security
Type
European Project
Start Date
01/03/2018
End Date
31/12/2021
Project Code
H2020-Galileo-2017-1-776293
Staff
-
-
Fourmy, Médéric
Researcher
-
Sanfeliu, Alberto
Researcher
-
Solà, Joan
Researcher
-
Vallvé, Joan
Researcher
-
Santamaria, Angel
Researcher
-
López, Alejandro
Support
-
Martí, Josep
Member
-
Laplaza, Javier
Member
-
Moreno, Francesc
Member
Project Description
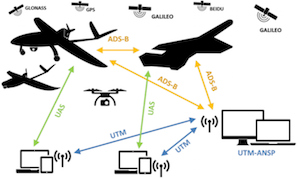
The GAUSS project aims fast and thorough achievement of acceptable levels in terms of performance, safety and security for both, current RPAS and future UTM operations. UTM helps control, manage and integrate all RPAS in the VLL airspace to ensure the security and efficiency of UAS operations. The key element within GAUSS is the integration and exploitation of Galileo-EGNOS exceptional features for precise and secure positioning. These features will enable not only safe, timely and efficient operations but also coordination among a higher number of RPAS with appropriate levels of security, as it provides anti-jamming and anti-spoofing capabilities. Multi-frequency and multi-constellation solutions will be exploited with this purpose. GAUSS will increase resilience in UTM operations and, at the same time, ensure UTM coordination capabilities to increase the number of platforms that can share the same airspace. Precise coordination among UAS in the air, together with individual high precision and secure positioning are key for the safety of the operations and therefore for the success of UTM. The UTM infrastructure will also benefit from the GAUSS Galileo-EGNOS based ADS-B solution and encrypted air- ground communications. GAUSS includes the definition, negotiation and execution of safe trajectories both in normal operation and in case security or safety is compromised. The GAUSS systems will be validated with two field trials (in-land and sea) with the operation of 4 UTM coordinated RPAS with different types (fixed and rotary wing) and EASA operational categories. The outcome of the project will consist of Galileo-EGNOS based technological solutions to enhance safety and security levels in current RPAS operations and future UTM based operations. Increased levels of efficiency, reliability, safety and security in RPAS operations are key enabling features to foster the European RPAS regulation and market development and their full acceptance by the European society.
Project Publications
Journal Publications
Conference Publications
-
J. Martí, J. Solà, C. Mastalli and A. Santamaria-Navarro. Squash-box feasibility driven differential dynamic programming, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2020, Las Vegas, NV, USA, pp. 7637-7644.
 Abstract
Abstract
 Info
Info
 PDF
PDF
-
W.O. Chamorro, J. Andrade-Cetto and J. Solà. High-speed event camera tracking, 2020 British Machine Vision Conference, 2020, (Virtual).
Abstract
Info
PDF
-
J. Martí, A. Santamaria-Navarro, C. Ocampo-Martínez and J. Andrade-Cetto. Multi-task closed-loop inverse kinematics stability through semidefinite programming, 2020 IEEE International Conference on Robotics and Automation, 2020, Paris, France, pp. 7108-7114, IEEE.
Abstract
Info
PDF
-
A. Jiménez, J. Andrade-Cetto, I. Tesfai, I. Dontas, C. Capitán, E. Oliveres, H. Jia and A. Kostaridis. Galileo and EGNOS as an asset for UTM safety and security, 25th Ka and Broadband Communications Conference, 2019, Sorrento, Italy.
Abstract
Info
PDF
-
M. Fourmy, D. Atchuthan, N. Mansard, J. Solà and T. Flayols. Absolute humanoid localization and mapping based on IMU Lie group and fiducial markers, 2019 IEEE-RAS International Conference on Humanoid Robots, 2019, , pp. 237-243.
Abstract
Info
PDF
-
A. Garrell Zulueta, C. Coll, R. Alquézar Mancho and A. Sanfeliu. Teaching a drone to accompany a person from demonstrations using non-linear ASFM, 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2019, Macau, China, pp. 1985-1991.
Abstract
Info
PDF


Follow us!