Seminar 21-11-2023 - Speaker: Tim Bretl ()
- Time: 12:00
- Place: Main meeting room
- Title: Mechanics, Manipulation, and Perception of Deformable Objects
- Abstract:
|
This talk is about robotic manipulation and perception of canonical "deformable linear objects" like a Kirchhoff elastic rod (e.g., a flexible wire). I continue to be amazed by how much can be gained by looking carefully at the mechanics of these objects and at the underlying mathematics. For example, did you know that the free configuration space of an elastic rod is path-connected? I'll prove it, and tell you why it matters.
|
- Links: Speaker info
345 Seminar 10-10-2023 - Speaker: Fadel Adib ()
- Time: 11:00
- Place: Main meeting room
- Title: Decoding Hidden Worlds: Unprecedented Sensing and Connectivity for Climate, Robotics, & Smart Environments
- Abstract:
|
This talk will cover a new generation of technologies that can sense, connect, and perceive the physical world in unprecedented ways. These technologies can uncover hidden worlds around us, promising transformative impact on areas spanning climate change monitoring, ocean mapping, healthcare, food security, supply chain, and even extraterrestrial exploration.
The talk will cover four core technologies invented by Prof. Adib and his team. The first is an ocean internet-of-things (IoT) that uses battery-free sensors for climate change monitoring, marine life discovery, and seafood production (aquaculture). The second is a new perception technology that enables robots to sense and manipulate hidden objects. The third is a new augmented reality headset with ``X-ray vision", which extends human perception beyond line-of-sight. The fourth is a wireless sensing technology that can "see through walls" and monitor people's vital signs (including their breathing, heart rate, and emotions), enabling smart environments that sense humans requiring any contact with the human body.
The talk will touch on the journey of these technologies from their inception at MIT to international collaborations and startups that are translating them to real-world impact in areas spanning healthcare, climate change, and supply chain.
|
- Links: Speaker info
344 Seminar 27-06-2023 - Speaker: Victor Sanchez-Anguix ()
- Time: 12:00
- Place: Main meeting room
- Title: Cooperating in the face of conflict: Heuristic-based automated negotiation
- Abstract:
|
Conflict is an inherent aspect of our daily lives, even in the most mundane tasks. As computational and autonomous systems become increasingly prevalent, conflict situations are bound to arise, whether it's humans collaborating with autonomous systems or autonomous systems cooperating with each other. To address such conflicts, negotiation emerges as a natural mechanism employed by humans. Likewise, computer scientists have proposed automated negotiation as an effective solution for managing conflict in computational and autonomous systems.
In this research talk, we aim to provide an introduction to the field of automated negotiation, shedding light on its key principles and distinguishing it from classic optimization approaches. We will explore the fundamental components of a negotiation model and delve into the diverse range of techniques employed in this domain. While exploring the potential applications of automated negotiation, we will place a particular emphasis on heuristic-based approaches due to their practical relevance in real-world scenarios.
To illustrate these concepts, we will present two heuristic-based negotiation models. First, we will examine a social bilateral agent, which leverages heuristics to negotiate and reach mutually beneficial agreements in agent-agent interactions. Furthermore, we will introduce a negotiation team model that utilizes heuristic-based automated negotiation techniques to enable collaboration and cooperation among a team of agents with a shared goal but conflicting preferences.
|
- Links: Speaker info
343 Seminar 19-01-2023 - Speaker: Elizabeth Sklar ()
- Time: 12:00
- Place: Main meeting room
- Title: Collaborative Robotic Systems for Sustainable Food Production
- Abstract:
|
There are many reasons why now is the time for collaborative robotic solutions to be deployed within the agri-food sector. A range of global problems must be addressed, such as climate change and the need to promote carbon sequestration and offset greenhouse gas emissions, or conserving the environment and the need to utilise natural resources more efficiently, or food security and the need to feed the world using existing farmland. As well, a range of local problems must also be addressed such as the need to harvest crops with a reduced labour force, or the fragility of the food supply chain and the need to strengthen agri-food logistics, or the increasing average age of farmers and the need to attract younger generations into the agri-food sector. This talk will explain how intelligent robotic systems -- working alongside humans -- can offer viable and trustworthy approaches to these challenges, illustrated through examples of current projects underway within the Lincoln Institute for Agri-food Technology at the University of Lincoln, UK.
|
- Links: Speaker info
342 Seminar 9-01-2023 - Speaker: Joaquim Ortiz ()
- Time: 12:00
- Place: Main meeting room
- Title: A Bidirectional Interface between Nonlinear Optimization and Symbolic Planning for Task and Motion Planning
- Abstract:
|
Robotic planning in real-world scenarios requires joint optimization of logic and continuous variables. In this talk, I will introduce our graph-based representation of robotic manipulation planning, that defines an explicit interface between logic symbols and nonlinear constraints and exposes a factored structure. Based on this representation, I will present a novel iterative algorithm that connects logic planning with nonlinear optimization through a bidirectional interface, informing the logic search about continuous infeasibilities ("A Conflict-driven Interface between Symbolic Planning and Nonlinear Constraint Solving", RAL 2022). The planner achieves state-of-the-art performance in Task and Motion Planning (TAMP), scaling up optimization-based approaches for TAMP to long tasks. Besides planning, our graph-based representation of robotic manipulation enables sample efficient and generalizable learning. I will briefly discuss how we can use supervised deep learning methods to accelerate two expensive computations in model based reasoning: 1 - detecting minimal conflicts ("Learning Feasibility of Factored Nonlinear Programs in Robotic Manipulation Planning", ICRA 2023 under review), and 2 - generating diverse samples in constraint manifolds ("Structured deep generative models for sampling on constraint manifolds in sequential manipulation", CoRL 2021).
|
- Links: Speaker info
341 Seminar 2-12-2022 - Speaker: Moghadam Peyman ()
- Time: 10:00
- Place: Main meeting room
- Title: 3D Geometry meets Learning
- Abstract:
|
In this talk, I will give an overview of current Deep Learning methods for lidar-based place recognition.
Place recognition aims to associate input lidar data to a global map or database of previously visited places in an environment.
This task is essential for loop closure during Simultaneous Location and Mapping (SLAM) or global relocalization of a robot in an existing map.
I will then discuss new challenges for current learning methods.
First, I will talk about continual Place Recognition task without catastrophic forgetting.
Second, I will discuss the challenges that unstructured, natural environments pose for long-term localization.
|
- Links: Speaker info
340 Seminar 13-7-2022 - Speaker: Gonzalo Ferrer ()
- Time: 12:00
- Place: Main meeting room
- Title: Mobile Robotics: Planning and Perception
- Abstract:
|
Full autonomy of mobile robots is one of the ultimate and most challenging goals in robotics
and it has been actively investigated, perhaps this constitutes one of the fundamental long-term
research challenges in field. In essence, this requires to deploy robots in indoors, urban or
outdoors environments, and robots being able to execute any given task efficiently, reliably and safely.
In this seminar, we will discuss some of the required ingredients to succeed in this challenge.
We will start discussing planning techniques applied to dynamic environments, with special emphasis
on correct uncertainty quantification and computational efficiency. Perception is of the world is
originated at the sensor level and it is not exempt of uncertainty. We will present precise algorithms
for sensor fusion and novel techniques applied to the processing of 3D point clouds for alignment and
no-reference metric.
|
- Links: Speaker info
339 Seminar 8-10-2021 - Speaker: Thomas Flayols ()
- Time: 9:30
- Place: Meeting room level -1
- Title: The Open Dynamic Robot Initiative
- Abstract:
|
This coming Friday 8/10/21 we will have the visit of Thomas Flayols from LAAS-CNRS. Thomas
is part of the developing team of the quadruped robot Solo from the Open Dynamic Robot Initiative.
He will be giving a short talk and then we’ll have the opportunity to discuss with him about many
aspects of the platform and the ODRI project, both in terms of hardware, software, estimation,
control, and whatsoever.
|
- Links: Open Dynamic Robot Initiative
338 Seminar 2-12-2020 - Speaker: Leonardo Colombo ()
- Time: 12:00
- Title: The interplay between geometric integration with cooperative and multi-agent systems
- Abstract:
|
In many engineering applications, numerical integrators for continuous-times equations of
motion of physical systems are usually derived by discretizing differential equations.
However, the inherent geometric structure of the governing continuous-time equations and
conserved quantities are not preserved in simulations with the traditional integrators.
Variational integrators are numerical methods derived from the discretization of variational
principles. These integrators retain some of the key geometric properties of the continuous
systems, such as preservation of the configuration space, momentum conservation, and also
exhibit easily verifiable behavior of the energy associated with the system. This class of
numerical methods has been applied to a wide range of problems in optimal control, constrained
systems, power systems, nonholonomic systems, and systems on Lie groups. In this seminar,
we will discuss the role of variational integrators in the coordinated motion of multi-agent systems.
|
- Links: Speaker info
337 Seminar 6-10-2020 - Speaker: Immaculada Llop Harillo ()
- Time: 12:00
- Title: Benchmarks for the design and evaluation of artificial hands
- Abstract:
|
In this seminar I will start introducing the Biomechanics and Ergonomics group at Universitat Jaume I
(Castelló) of which I am a member and the research project I am working on “Development of benchmarks
for the experimental evaluation of artificial hands. Application to the design of better robotic and
prosthetic hands”. I will present my doctoral thesis entitled “Methods for the design and evaluation
of anthropomorphic artificial hands”. Those proposed methods are based on the comparison with the
performance of the human hand and the evaluation of the degree of anthropomorphism of artificial
hands (both robotic and prosthetic) was approached from three complementary perspectives:
experimentation, definition of analytical indexes and simulation by means of models. Finally,
I will explain some of our latest research on grasping benchmarks.
|
- Links: Sala meet, Speaker info
336 Seminar 6-2-2020 - Speaker: Bernabé Linares-Barranco ()
- Time: 11:00
- Title: Spiking Neuromorphic Sensing and Processing Hardware. Application to Artificial Bio-Inspired Vision and Exploitation of Novel Nanotechnologies
- Abstract:
|
Biological Vision sensing and processing is not based on acquiring sequences
of images and their consequent processing. Biological retinae do not take pictures
that are sent to cortex for higher level processing. However, most of artificial
computer vision is based on acquiring sequences of images and processing them
frame-by-frame to perform some function (object recognition, scene analysis, SLAM, ...).
In this talk we present artificial vision and sensing based on the Spiking Neural
Network (SNN) paradigm, which emulates biological sensing and processing more
closely, and which is usually referred to as the Neuromorphic approach. We
will present chips and systems for neuromorphic visual sensing and processing,
as well as FPGA based developments. Interestingly, recent advances in Nanotechnologies
have provided new nanoscale memory devices (such as memristors) which can behave
similar to biological SNN synapses. Nanoscale memristors promise to be fabricated
over CMOS substrates with densities of over 4x10^12 elements per cm^2 (which
corresponds to a 50nm pitch), or even higher. This would provide an overwhelming
memory density very tightly coupled to CMOS computing elements. There are many
fields where this disruptive advantage can be exploited. One of them is neuromorphic
computing and learning systems. In this talk we will also present some ideas on how
to exploit this technological possibility for implementing hybrid memristive-CMOS
neuromorphic systems, as well as on-going work.
|
- Links: Speaker info
335 Seminar 28-1-2020 - Speaker: Richard D. Braatz ()
- Place: Sala de Actes FME (Edifici U)
- Time: 10:30
- Title: New Directions in the Control of Advanced Manufacturing Systems
- Abstract:
|
Interest has increased in recent years in the design of advanced manufacturing
systems, towards making major advances in product quality and productivity.
Some specific advanced manufacturing systems are used to illustrate their
control-relevant characteristics, which include (1) high to infinite state
dimension, (2) parameter uncertainties, (3) time delays, (4) unstable zero
dynamics, (5) actuator, state, and output constraints, (6) stochastic noise
and disturbances, and (7) phenomena described by combinations of algebraic,
ordinary differential, partial differential, and integral equations (that is,
generalizations of descriptor/singular systems). Progress is discussed in the
development of systems and control methods to address these challenges, which
include hierarchical “plantwide” control coupled with sensitivity and probabilistic
uncertainty analyses; “plug-and-play” technology for accelerating the design and
implementation of automation, systems, and control solutions; and stochastic model
predictive control formulations. Both experimental and realistic simulation results
are presented for advanced manufacturing facilities developed, constructed, and
thoroughly validated at the Massachusetts Institute of Technology.
|
- Links: Speaker info
334 Seminar 23-1-2020 - Speaker: Jong-Il Park ()
- Title: Realtime 3D freeform manipulation of facial video
- Abstract:
|
In this talk, a framework for real-time 3D freeform manipulation of
facial video is presented after a brief introduction to recent research
at Mixed Reality Lab, Hanyang University. Unlike existing approaches,
the proposed framework provides natural 3D manipulation of a face without
causing scene distortion and it also provides interactive face editing by
a user’s input, which leads to freeform manipulation of face in the true
sense of the word. A 3D morphable face model is first fitted to the face
region in a video frame and deformed by the user’s input. The video frame
is then mapped as a texture to the deformed model, and the model is rendered
on the video frame. Because of the high computational cost, parallelization
and acceleration schemes are also adopted for real-time performance.
Evaluation and comparison results show that the proposed framework
is a promising solution for 3D face editing in live video. A couple
of AR application scenarios will be demonstrated.
|
- Links: Speaker Lab
333 Seminar 9-1-2020 - Speaker: Dimitris Samaras ()
- Title: Unsupervised methods for face editing
- Abstract:
|
The face is the most informative human feature and has been a major
research topic in Computer Vision and Graphics. Image of faces are also
ubiquitous in photography and social media, and people have devoted
significant resources to capturing and editing face images. Face editing
can be broadly viewed as the encoding, the manipulation, and the decoding
of face image representations. It is challenging to manipulate an image in
a controllable way and generate results that are both desirable and as realistic
as possible. In this talk I will discuss our work on Machine Learning-based face
editing approaches by learning both the physical aspects as well as the statistical
manifold of human faces. I will focus on Deforming Autoencoders, a network that learns
to disentangle shape and appearance in an unsupervised manner. This disentanglement is
beneficial for the learning of some other factors of variation, such as illumination and
facial expression. In an extension of Deforming Autoencoders, we incorporate non-rigid
structure-from-motion to learn a 3D morphable model for faces that can be trained on a 2D
image set, without additional annotation or corresponding 3D data.
|
- Links: Speaker info
332 Seminar 19-12-2019 - Speaker: Juan Lobo-Prat ()
- Title: Summary of my year at IRI
- Abstract:
|
In this seminar I will give an overview of the work that I carried out during my year
at IRI. First, I will present the results of a feasibility study that was done in
collaboration with Hospital Sant Joan de Déu to test the MOVit wheelchair with a group
of patients with muscular dystrophy. Second, I will show the development of the first
prototype of the ArmTracker, a wearable sensing device that is capable of measuring arm
activity during daily life. Finally, I will show my involvement in the Clothilde project,
and round off with a short explanation of the work that I will be doing at ABLE Human Motion.
|
- Links: Speaker info
331 Seminar 5-12-2019 - Speaker: Valerio Ortenzi ()
- Title: Robotic manipulation and the role of the task: a focus on object handovers
- Abstract:
|
Humans perform object manipulation in order to execute a specific task. Seldom is such action
started with no goal in mind. In contrast, traditional robotic grasping (first stage for object
manipulation) seems to focus purely on getting hold of the object—neglecting the goal of the
manipulation. Most metrics used in robotic grasping do not account for the final task in their
judgement of quality and success. Since the overall goal of a manipulation task shapes the
actions of humans and their grasps, the task itself should shape the metric of success. To
this end, I will present a new metric centred on the task.
In the context of object handovers, humans display a high degree of flexibility and
adaptation. These characteristics are key for robots to be able to interact with the
same fluency and efficiency with humans. I will present my work on human-human and
robot-human handovers and explain why an understanding of the task is of importance
for robotic grasping.
Finally, I will give a brief overview of the work in the Extreme Robotics Lab at the
University of Birmingham.
|
- Links: Speaker info
330 Seminar 2-12-2019 - Speaker: José de Gea ()
- Title: Cognitive Collaborative Robotics in the Factory of the Future
- Abstract:
|
In the near future, rigid manufacturing lines will be likely complemented, if not
completely replaced, by hybrid teams composed of humans and robots. In this scenario,
robots (both stationary as well mobile systems) will need to be collaborative and
intelligent. Such hybrid teams will take over a variety of assembly operations on
today‘s existing production lines. In such future scenario, robots do not solely
execute fully-automatized processes but instead become cooperative partners of the
human worker, taking over non-ergonomic assembly operations and using contextual
information to support the selection of tools or to adapt their behaviour to ongoing
tasks. To achieve the previously-described scenarios, we need to work on several key
aspects in order to increase the autonomy level, adaptivity and intelligence of current
robotic systems. A prerequisite for having more intelligent robots in factory environments
is to immerse them in sensory-rich environments. That is, sensorise the environments
and digitalise the information, so that robots can (also) make use of the information
about what is going on around them. Furthermore, in order to introduce a new category
of collaborative robots to be real collaborative partners to humans, three key
aspects need to be further developed:
- First, safety of the robot needs to be guaranteed at all times.
- Second, better strategies for dynamic mobility in such dynamic environments are required.
- Third, more intuitive channels to communicate and understand what the robot is doing are needed.
Once we have developed further the two previous requisites (digitalization and safe,
mobile and intuitive robots), we can work towards a longer-term goal: autonomous cognitive
robots which make use of contextual information as well as previous experiences to adapt
their behaviour to the current situation. At this point, three key aspects are relevant:
- The use of this additional contextual information and background knowledge
to grant robots more flexible robot skills (such as navigation, interaction, perception
or manipulation) which allow them to quickly adapt to the ongoing situation or to changing needs.
- A cognitive robot software architecture that integrates high-level and low-level
capabilities (symbolic and numerical information) in a robot-agnostic generic software
framework that allows reuse of skills and generation of new (complex behaviors) based
on a set of basic pre-defined robot skills.
- Last but not least, the industrial robots of the future need to be equipped
with the ability of learning and adapting new skills (grasping objects not seen
before, adaption of robot skills to a new robot‘s morphology, etc…).
|
- Links: Speaker info
329 Seminar 11-11-2019 - Speaker: Marcel Heerink ()
- Title: Social robots in care and education – experiences and lessons learned
- Abstract:
|
For 14 years I’ve been working on research concerning the application of social robots for groups
with special needs, like older adults, people with dementia, children with autism and long time
hospitalized children. In my presentation I’ll share the acquired insights and experiences, addressing
ethics, findings concerning human perception of social robots and AI in general, working in
multidisciplinary teams and both current and future challenges in human robot interaction research.
|
- Links: Speaker info
328 Seminar 11-10-2019 - Speaker: Gil Serrancolí ()
- Title: Integration of algorithmic differentiation tools in OpenSim to solve optimal control problems
- Abstract:
|
Algorithmic differentiation tools are very powerful when computing partial derivatives. This method
can give exact values of the derivatives and much faster than using traditional methods, such as
finite differences. This fact can be extremely useful when solving optimal control problems based
on the resolution of gradient-based optimizations. We introduced these tools in an open-source
biomechanics software (OpenSim) and its physics engine (Simbody), to solve biomechanical
optimal control problems. We show that these problems can be solved about 20 times faster
than using finite differences. We applied the method in optimal control problems to calibrate
subject-exoskeleton and foot-ground contacts to then predict collaborative movements. We also
applied it to predict human gait.
|
- Links: Speaker info
327 Seminar 12-9-2019 - Speaker: Raffaele Di Gregorio()
- Time: 10:00-13:00
- Place: Floor -1 meeting room
- Title: Dynamics of Planar Mechanisms
- Abstract:
- Dynamic models of single-DOF planar mechanisms based on centrodes and velocity coefficients
- Mechanics of planar mechanisms in the configuration space
|
- Links: Speaker info, Program and references, Slides
326 Seminar 9-9-2019 - Speaker: Raffaele Di Gregorio ()
- Time: 10:00-13:00
- Place: Floor -1 meeting room
- Title: Extension to Spherical Kinematics by Using Instantaneous Pole Axes (IPAs)
- Abstract:
- From planar to spherical geometry: notations
- Systematic determination of all the IPAs
- Singularity analysis of spherical mechanisms with the IPAs
|
- Links: Speaker info, Program and references, Slides
325 Seminar 6-9-2019 - Speaker: Raffaele Di Gregorio ()
- Time: 10:00-13:00
- Place: Floor -1 meeting room
- Title: Planar Kinematics Revisited through Instant Centers (ICs)
- Abstract:
- Role of the ICs in planar mechanism design (e.g., vehicle suspensions, lower-limb prostheses for amputees, etc.)
- Systematic determination of all the ICs: the case of the indeterminate linkages
- Singularity analysis with the ICs: single-DOF and multi-DOF mechanisms
|
- Links: Speaker info, Program and references, Slides
324 Seminar 5-9-2019 - Speaker: Gionata Salvietti ()
- Title: Transferring human hand skills onto robots
- Abstract:
|
This is an exciting and pivotal moment in the history of robotics. As the gap
between theoretical research and fully-fledged technology continues to close,
important advances from mechanical design to decision algorithms are
enabling robots to reliably carry out more complex tasks than ever before,
unlocking an enormous potential for new applications. Once confined into
cages, robots are quickly entering in the user workspace at different levels. In
this talk, I will mainly focus on intelligent human-centred robotics. In particular,
I will show strategies to transfer human manipulation skills onto robots so to
let robots act in unstructured and unknown environments both in autonomous
and in a teleoperation framework. I will also show how soft robotics can
enhance safety in physical human-robot cooperation and how this can be
exploited for the design of assistive device and novel soft-grippers.
|
- Links: Speaker info
323 Seminar 19-7-2019 (at 10:00) - Speaker: Eren Aksoy ()
- Title: A Holistic View on Manipulation Semantics: From Robot Perception to Execution
- Abstract:
|
Robots require a generic action representation in order to recognize, learn, and imitate observed tasks
without any human intervention. Defining such a representation is a challenging problem due to the high
inter-individual variability that emerges during the execution of actions. Conventional methods approach
this problem by either considering continuous trajectory profiles or employing predefined symbolic action
knowledge. The main challenge, however, still remains in linking perceived continuous sensory signals to
discrete symbolic object or action concepts.
In this talk, I will promote a new holistic view on manipulation semantics, which combines the perception
and execution of manipulation actions in one unique framework, so-called “Semantic Event Chain” (SEC).
The SEC concept is an implicit spatiotemporal formulation that encodes actions by coupling the observed
effect with the exhibited roles of manipulated objects. In the first part of the talk, I will explain how
such a semantic action encoding can allow robots to link continuous visual sensory signals (e.g. image
sequences) to their symbolic descriptions (e.g. action primitives). I will then elaborate on creating
a robot-agnostic semantic library of actions to be further employed to generate complex chained
manipulation sequences while grounding high-level symbolic plans into the low-level sensory-motor.
To highlight the scalability of manipulation semantics, I will finally introduce various applications
of SECs on learning object affordances, coupling language and vision, and memorizing episodic experiences.
|
- Links: Speaker info
322 Seminar 28-6-2019 - Speaker: Francesco Zanlungo ()
- Title: Modelling the motion of pedestrian groups
- Abstract:
|
We show how a few basic assumptions on the behaviour of socially interacting pedestrians
may lead to the development of a mathematical model of their dynamics. Namely, by assuming
that the pedestrian try to establish a position that maximises comfort both in locomotion and
social communication, we express their dynamics through a potential function. The model can
be solved analytically and correctly predicts the statistical properties of small pedestrian
groups. The model can be extended to account for changing environmental conditions such as
crowd density, and adapted to different kinds of social interactions (e.g. groups of friends,
colleagues, families). The model may also be implemented as a component of a simulator to
improve its ability of reproducing realistic crowd behaviour.
|
- Links: Speaker info
321 Seminar 6-6-2019 - Speaker: Adrián Peñate ()
- Title: Learning High dimensional representations from 3D inputs
- Abstract:
|
We present different 2 examples of how to learn high dimensional representations/features
to perform different tasks like localisation or shape retrieval. Although quite different
problems, we show how similar the way to solve them can be and how this notions can be
extrapolated to improve the performance of other tasks. The first case shows an application
to shape retrieval that is solely learnt from 3D models and that creates a high dimensional
representation that can be used to understand both images and 3D models. The second case
presents a solution of how to learn high dimensional spaces that can describe features in
point clouds at a state of the art performance while being substantially less computationally
demanding. In both cases the notions of how to structure the high dimensional spaces are the same.
We will show that understanding how to shape the feature space is the key factor in obtaining
a good performance rather than the underlying architecture.
|
- Links: Speaker info
320 Seminar 2-5-2019 - Speaker: Sebastian Sardina ()
- Title: Automatic Behavior Composition
- Time: 11:00
- Abstract:
|
With computers now present in everyday devices like mobile phones,
credit cards, cars and planes or places like homes, offices and
factories, the trend is to build embedded complex systems from a
collection of simple components. For example, a complex smart house system
can be ``realised'' (i.e., implemented) by suitably coordinating the behaviours
(i.e., the operational logic) of hundreds (or thousands) of simple devices
and artifacts installed in the house, such as lights, blinds, game consoles,
a vacuum cleaner, video cameras, audio systems, TVs, a floor cleaning robot, etc.
The problem of automatically synthesising, that is, building, an effective
coordinator controller for a given desired target system is called the
behaviour composition problem and is the focus of this talk. The composition
task can be recast in a variety of domains, including robot ecologies,
ubiquitous robots or intelligent spaces, web-services, component-based
development (CBD), agent programming, and automated planning.
The talk will cover the standard formalization of the problem, several
extensions proposed, and the main computational techniques proposed.
Importantly, the behavior composition problem draws from various areas of Artificial
Intelligence and Computer Science, including verification, reasoning about
action, web-services, and generalized planning.
|
- Links: Speaker info
319 Seminar 14-3-2019 - Speaker: Sorin Olaru ()
- Title: Positive invariant sets for time-delay systems
- Abstract:
|
The aim of this talk is to discuss the set invariance concepts for linear
time-delay systems. When described in discrete-time, these dynamics allow
different set-invariance formulations according to the state space representation.
A series of classical or novel existence conditions will be discussed in this
framework. On a broader scope it will be shown that set-factorization represents
a generalized framework for the characterization of these families of invariant
sets. The links with the stability, robustness and applications to mode detection
and constrained control design will be also mentioned.
|
- Links: Speaker info
318 Seminar 14-2-2019 - Speaker: Luis Herranz ()
- Title: Generative adversarial networks and lifelong learning
- Abstract:
|
Generative adversarial networks (GANs) is a relatively new approach to generative modeling based on two networks
competing in an adversarial game. It has been particularly effective for image generation and applied to numerous
challenging tasks, such as generic image-to-image translation. On the other hand, lifelong learning addresses the
problem of learning new tasks while not forgetting the previously learned ones, a natural setting to humans where
machines perform poorly. In this talk I will briefly present our recent works on these two topics, including mix
and match networks for cross-modal image-to-image translation, a study on knowledge transfer on GANs, and rotated
elastic weight consolidation to prevent catastrophic forgetting. Finally, I will introduce memory replay GANs,
which address the problem of lifelong learning in image generation models.
|
- Links: Speaker info
317 Seminar 13-2-2019 - Speaker: Francisco Barranco ()
- Title: Bio-inspired strategies based on active vision sensors for navigation and robotics
- Abstract:
|
The visual information we receive is not limited so that we are only passive observers, but active agents
in our dynamic environment. In such case, it is required to close perception-action loos in real time.
In the case of vision, shortening the latency of vision processing is one of the most important issues
robotic systems need to overcome. There, it is a potential niche for a new generation of bio-inspired
active vision sensors that work at very high frequencies generating sparse information. These sensors
work at maximum temporal frequencies of a few microseconds and still have high-dynamic range. This last
property is very important for real-world applications since it reduces artefacts due to illumination
changes. In our case, we will present the advantages of using DVS (Dynamic Vision Sensor) and
DAVIS (Dynamic and Active Pixel Vision Sensor). We will also present some results of our latest
works on event-driven motion estimation and border detection and proto-segmentation purely based
on event data.
|
- Links: Speaker info
316 Seminar 8-11-2018 and 15-11-2018 - Speaker: Joan Solà ()
- Title: Course on basic Lie theory for estimation in robotics
- Time: 11-13 h (2 hours each session)
- Abstract:
|
A Lie group is an old mathematical abstract object dating back to the XIX century,
when mathematician Sophus Lie laid the foundations of the theory of continuous
transformation groups. As it often happens, its usage has spread over diverse areas
of science and technology many years later. In robotics, we are recently experiencing
an important trend in its usage, at least in the fields of estimation, and particularly
in motion estimation for navigation.
Yet for a vast majority of roboticians, Lie groups are highly abstract constructions and
therefore difficult to understand and to use. This may be due to the fact that most of the
literature on Lie theory is written by and for mathematicians and physicists, who might be
more used than us, perhaps by their academic formation, to the deep abstractions this theory
deals with.
In estimation for robotics, it is not necessary to exploit the full capacity of the theory,
and therefore an effort of selection of materials is required. In this two-sessions course,
I will walk you through the basic principles of the Lie theory, with the aim of conveying
clear and useful ideas. I have taken a particular approach which I consider didactical,
based on some principles:
The fist principle is pertinence: we will present the key aspects of the theory that are
pertinent for the needs of estimation in robotics. We will therefore discard a significant
part of the theoretical corpus of the Lie theory.
The second principle is concretion. We will ground every abstract concept with examples
from our common background. We will illustrate the Lie theory through explanations on the
groups of rotation matrices, rigid motion matrices,
quaternions, and complex numbers.
The third principle is connectedness. We will present the key elements of the Lie theory
in a way that connects with easier concepts in vector spaces and linear algebra. This will
render the ideas more intuitive and easier to grasp.
The fourth principle is usefulness. We will present the concepts in a way that allow us
to build tools that are useful for our tasks. In particular, we will define operators,
derivatives, Jacobian matrices, perturbations, covariances matrices, and time-integrals.
Through connectedness, they will resemble what we know from linear algebra in vector spaces.
Also, we will be able to manipulate them in very familiar ways.
The course is organized in two sessions of two hours each. As the name tells, these sessions
are designed as courses, not seminars. I therefore encourage assistants to take an active role,
possibly taking notes and above all making questions and debate. It is through some effort that
non-trivial concepts are acquired.
|
- Links: Speaker info
315 Seminar 18-10-2018 - Speaker: Dan Halperin ()
- Title: Multi-Robot Motion Planning: The Easy, the Hard and the Uncharted
- Abstract:
|
Early results in robot motion planning had forecast a bleak future
for the field by showing that problems with many degrees of freedom,
and in particular those involving fleets of robots, are intractable.
Then came sampling-based planners, which have been successfully, and
often easily, solving a large variety of problems with many degrees
of freedom.
We strive to formally determine what makes a motion-planning problem
with many degrees of freedom easy or hard. In the first part of the
talk I'll describe our quest to resolve this (still wide open)
problem, and some progress we have made in the context of multi-robot
motion planning.
In the second part of the talk I'll review recent algorithms that we
have developed for multi-robot motion planning, which come with near-
or asymptotic-optimality guarantees.
|
- Links: Speaker info
314 Seminar 11-10-2018 - Speaker: Teresa Vidal-Calleja ()
- Title: Mapping Down Under
- Abstract:
|
In this talk, I will briefly introduce the research at the UTS: Centre for Autonomous Systems.
After that, I will go through my research in perception applied to infrastructure and livestock
assessment, where I will briefly describe multiple mapping algorithms for diverse sensing
modalities, such as sound-based, electromagnetic, vision and lidar-based sensors.
In particular, I will focus on two of my recent work on 2D Mapping with Correlation
and 3D Lidar-Inertial integration.
|
- Links: Speaker info
313 Seminar 10-10-2018 - Speaker: José del R. Millán ()
- Title: Brain-Machine Interfaces: Beyond Decoding
- Abstract:
|
A brain-machine interface (BMI) is a system that enables users to interact with
computers and robots through the voluntary modulation of their brain activity.
Such a BMI is particularly relevant as an aid for patients with severe neuromuscular
disabilities, although it also opens up new possibilities in human-machine interaction
for able-bodied people. Real-time signal processing and decoding of brain signals are
certainly at the heart of a BMI. Yet, this does not suffice for subjects to operate a
brain-controlled device. In the first part of my talk I will review some basic machine
learning components that facilitate user learning as well. I will then discuss studies,
most involving users with severe motor disabilities, showing that BMI is more than just
decoding. A central theme is the need for a comprehensive mutual learning methodology
that reinstates the three learning pillars of a brain-controlled device (at the machine,
subject, and application level) as equally significant. Finally, I will discuss recent work
in our laboratory illustrating how to enhance subject learning and BMI performance through
appropriate feedback modalities.
|
- Links: Speaker info
Seminar 27-9-2018 - 312 Speaker: Ricard Bordalba ()
- Title: A Singularity-Robust LQR Controller for Parallel Robots
- Abstract:
|
Parallel robots exhibit the so-called forward singularities, which complicate substantially
the planning and control of their motions. Often, the issues introduced by such configurations
are circumvented by restricting the motions to singularity- free regions of the workspace.
However, this comes at the expense of reducing the motion range of the robot substantially.
It is for this reason that, recently, efforts are underway to control singularity-crossing
trajectories. This paper proposes a reliable controller to stabilize such kind of trajectories.
The controller is based on the classical theory of linear quadratic regulators, which we adapt
appropriately to the case of parallel robots. As opposed to traditional computed-torque methods,
the obtained controller does not rely on expensive inverse dynamics computations. Instead, it
uses an optimal control law that is easy to evaluate, and does not generate instabilities at
forward singularities. The performance of the controller is exemplified on a five-bar parallel
robot accomplishing two tasks that require the traversal of singularities.
|
- Links: Speaker info, IROS-18
- 311 Speaker: Júlia Borràs ()
- Title: The KIT Swiss Knife Gripper for Disassembly Tasks: A Multi-Functional Gripper for Bimanual Manipulation with a Single Arm
- Abstract:
|
This work presents the concept of a robotic gripper designed for the disassembly of
electromechanical devices that comprises several innovative ideas. Novel concepts
include the ability to interchange built-in tools without the need to grasp them,
the ability to reposition grasped objects in-hand, the capability of performing classic
dual arm manipulation within the gripper and the utilization of classic industrial robotic
arms kinematics within a robotic gripper. We analyze state of the art grippers and robotic
hands designed for dexterous in-hand manipulation and extract common characteristics and
weak points. The presented concept is obtained from the task requirements for disassembly
of electromechanical devices and it is then evaluated for general purpose grasping,
in-hand manipulation, and operations with tools. We further present the CAD design
for a first prototype.
|
- Links: Speaker info, IROS-18
310 Speaker: Adrià Colomé ()
Title: Dimensionality Reduction in Learning Gaussian Mixture Models of Movement Primitives for Contextualized Robot Action Selection
Abstract:
|
Robotic manipulation often requires adaptation to changing environments. Such changes can be
represented by a certain number of contextual variables that may be observed or sensed in
different manners. When learning and representing robot motion –usually with movement primitives–,
it is desirable to adapt the learned behaviors to the current context. Moreover, different
actions or motions can be considered in the same framework, using contextualization to
decide which action applies to which situation. Such frameworks, however, may easily become
large-dimensional, thus requiring to reduce the dimensionality of the parameters space,
as well as the amount of data needed to generate and improve the model over experience.
In this paper, we propose an approach to obtain a generative model from a set of actions
that share a common feature. Such feature, namely a contextual variable, is plugged into
the model to generate motion. We encode the data with a Gaussian Mixture Model in the
parameter space of Probabilistic Movement Primitives (ProMPs), after performing
Dimensionality Reduction (DR) on such parameter space. We append the contextual
variable to the parameter space and obtain the number of Gaussian components, i.e.,
different actions in a dataset, through Persistent Homology . Then, using multimodal
Gaussian Mixture Regression (GMR), we can retrieve the most likely actions given a contextual
situation and execute them. After actions are executed, we use Reward-Weighted Responsibility
GMM (RWR-GMM) update the model after each execution. Experimentation in 3 scenarios shows that
the method drastically reduces the dimensionality of the parameter space, thus implementing
both action selection and adaptation to a changing situation in an efficient way.
|
Links: Speaker info, IROS-18
309 Speaker: Alejandro Suárez ()
Title: Interleaving hierarchical task planning and motion constraint testing for dual-arm manipulation
Abstract:
|
In recent years the topic of combining motion
and symbolic planning to perform complex tasks in the field
of robotics has received a lot of attention. The underlying
idea is to have access at once to the reasoning capabilities of
a task planner and to the ability of the motion planner to
verify that the plan is feasible from a physical and geometrical
point of view. The present work describes a framework to
perform manipulation tasks that require the use of two robotic
manipulators. To do so we employ a Hierarchical Task Network
(HTN) planner interleaved with geometric constraint verification.
In this framework we also consider observation actions
and handle noisy perceptions from a probabilistic perspective.
These ideas are put into practice by means of an experimental
set-up in which two Barrett WAM robots have to cooperatively
solve a geometric puzzle. Our findings provide further evidence
that considering explicitly physical constraints during task
planning, rather than deferring their validation to the moment
of execution, is advantageous in terms of execution time and
breadth of situations that can be handled.
|
Links: Speaker info, IROS-18
308 Speaker: Aleksandar Taranovic ()
Title: Adaptive Modality Selection Algorithm in Robot-Assisted Cognitive Training
Abstract:
|
Interaction of socially assistive robots with users is based on social cues coming from different
interaction modalities, such as speech or gestures. However, using all modalities at all times
may be inefficient as it can overload the user with redundant information and increase the task
completion time. Additionally, users may favor certain modalities over the other as a result of
their disability or personal preference. In this paper, we propose an Adaptive Modality Selection
(AMS) algorithm that chooses modalities depending on the state of the user and the environment,
as well as user preferences. The variables that describe the environment and the user state are
defined as resources, and we posit that modalities are successful if certain resources possess
specific values during their use. Besides the resources, the proposed algorithm takes into
account user preferences which it learns while interacting with users. We tested our algorithm
in simulations, and we implemented it on a robotic system that provides cognitive training,
specifically Sequential memory exercises. Experimental results show that it is possible to
use only a subset of available modalities without compromising the interaction. Moreover,
we see a trend for users to perform better when interacting with a system with implemented
AMS algorithm.
|
Links: Speaker info, IROS-18
307 Speaker: Ely Repiso ()
Title: Robot Approaching and Engaging People in a Human-Robot Companion Framework
Abstract:
|
This paper presents a new model to make robots capable of approaching and engaging people
with a human-like behavior, while they are walking in a side-by-side formation with a person.
This method extends our previous work, which allows the robot to adapt its navigation behaviour
according to the person being accompanied and the dynamic environment. In the current work,
the robot is able to predict the best encounter point between the human-robot group and the
approached person. Then, in the encounter point the robot modifies its position to achieve
an engagement with both people. The encounter point is computed using a gradient descent
method that takes into account all people predictions. Moreover, we make use of the
Extended Social Force Model (ESFM), and it is modified to include the dynamic goal.
The method has been validated over several situations and in real-life experiments,
in addition, a user study has been realized to reveal the social acceptability of
the robot in this task.
|
Links: Speaker info, IROS-18
306 Seminar 26-09-2018 - Speaker: Andrés F. Marmol ()
- Title: ArthroSLAM: Robust camera localization and dense 3D reconstruction for minimally invasive orthopaedic surgery
- Abstract:
|
Minimally invasive orthopaedic surgeries are very challenging procedures that require the manipulation of instruments
in limited intraarticular space using distorted and sometimes uninformative images. Localizing the arthroscope reliably
and at all times w.r.t. surrounding tissue is of fundamental importance to prevent unintended injury to patients.
A detailed reconstruction of the surrounding tissues is also of great interest for diagnostic purposes. In this
talk I will present our research on a visual Simultaneous Localisation and Mapping (SLAM) system, termed ArthroSLAM,
for robotic-assisted minimally invasive orthopaedics. The talk will address three fundamental aspects of the system:
Feature detection and matching, robust camera localization and accurate dense 3D reconstruction. ArthroSLAM fuses
the information obtained from the arthroscope, an external camera mounted on an arthroscope holder, and the odometry
of a robotic arm manipulating the scope. The resulting robust localization prior is later used in a keyframe-based
MultiView stereo for dense 3D reconstruction. To the best of our knowledge, this is the first demonstration of a
SLAM system in arthroscopy. We compare our method against various strategies, including state-of-the-art SLAM systems,
in a number of experiments using realistic setups with human cadaver knee joints.
Our system is shown to outperform alternative strategies under various challenging conditions, both in terms of
localization and reconstruction accuracy. Additional experiments conducted with synthetically degraded data also
validate the robustness of our system.
|
- Links: Speaker info
305 Seminar 13-9-2018 - Speaker: Aditya Kapilavai ()
- Title: Efficient Evaluation and Optimization Of Automated Gripper Finger Design For Industrial Robotic Applications
- Abstract:
|
Gripper fingers design is a current and an important problem in industrial robotics. Recently, advances have been made to
replace the arduous manual trial-and-error design process with optimization methods based on dynamic simulations. In these
approaches, the gripper fingers are parametrized and evaluated by simulating multiple grasp sets in order to obtain the
quality score, which is subsequently optimized. The computational efficiency of this process depends on: (1) the choice
of the scoring function that provides robust evaluation with a minimal number of grasps, (2) the choice of optimization
algorithm that converges to global optimum quickly and (3) the choice of optimization method and meta-parameters.
In this paper, we present considerations pertaining to these three problems. We use the previously proposed
gripper finger design and optimization methods for generating a finger cut-out for an asymmetrical object used
in industrial assembly tasks. We suggest two new alignment quality scores and compare their efficiency with
preexisting methods. In addition, compare the performance of two optimization methods (one local and one
global) and find the meta-parameters for the local method.
|
- Links: Speaker info
304 Seminar 13-7-2018 - Speaker: José de Gea Fernández ()
- Title: Hybrid Teams in Space and Industry Applications
- Abstract:
|
Many aspects in different fields of robotics need to be considered to endow robots with more autonomous,
adaptive and intuitive human-robot cooperation skills in the context of the factories of the future or
in future space missions that deploy hybrid teams composed of robots and humans. In this talk some of
the challenges such as safety, intuive use and programming or context-based behaviour will be highlighted.
The transfer of results from space projects to industry and, viceversa, from industry back to space
applications will be also presented using examples of past and current projects at the DFKI
Robotics Innovation Center.
|
- Links: Speaker info
303 Seminar 12-7-2018 - Speaker: Anaís Garrell ()
- Title: Human-Robot Interaction with UAVs: Challenges and Frontiers
- Abstract:
|
Lately, there has been a growing interest in making autonomous robots able to interact with people.
This challenging goal has opened many new research issues regarding the social capabilities robots
should perform, for instance assisting people in public spaces or helping ageing people in homes.
Furthermore, interest in flying-robots is growing significantly, and they are becoming more autonomous,
meaning that their interaction and close collaboration with humans is the next step in terms of research
and technical challenges. Therefore, this workshop deals with human-robot-interaction with UAVs, specifically
the existing challenges and the frontiers found by researchers.
Specifically, the main objectives of this workshop are two-fold. First, we will highlight recent developments
in HRI with UAV's. We will compare state-of-the-art approaches and the current challenges researchers are
working on. Moreover, we will introduce the frontiers authors have recently found during their investigations,
encouraging discussions among participants to identify the current challenges and unsolved problems.
Second, we will motivate our expert speakers to describe (1) which kind of tasks these social flying
robots may solve and how they may assist and help people, and (2) how to open new avenues to build
flying robots with greater capability to interact with people.
|
- Links: Speaker info, ICRA-18, Workshop
Seminar 28-6-2018 - 302 Speaker: Soheil Sarabandi ()
- Title: Accurate Computation of Quaternions from Rotation Matrices
- Abstract:
|
The main non-singular alternative to 3×3 proper orthogonal matrices, for representing
rotations in R^3, is quaternions. Thus, it is important to have reliable methods to pass
from one representation to the other. While passing from a quaternion to the corresponding
rotation matrix is given by Euler-Rodrigues formula, the other way round can be performed
in many different ways. Although all of them are algebraically equivalent, their numerical
behavior can be quite different. In 1978, Shepperd proposed a method for computing the
quaternion corresponding to a rotation matrix which is considered the most reliable method
to date. Shepperd’s method, thanks to a voting scheme between four possible solutions,
always works far from formulation singularities. In this paper, we propose a new method
which outperforms Shepperd’s method without increasing the computational cost.
|
- Links: Speaker info, ARK18
301 Speaker: Ricard Bordalba ()
Title: Randomized Planning of Dynamic Motions Avoiding Forward Singularities
Abstract:
|
Forward singularities, also known as direct, or actuator singularities, cause many problems
to the planning and control of robot motions. They yield position errors and rigidity losses of
the robot, and generate unbounded actions in typical control laws. To circumvent these issues,
this paper proposes a randomized kinodynamic planner for computing trajectories avoiding
such singularities. Given initial and final states for the robot, the planner attempts to
connect them by means of a dynamically-feasible, singularity-free trajectory that also respects
the force limits of the actuators. The performance of the strategy is illustrated in simulation
by means of a parallel robot performing a highly-dynamic task.
|
Links: Speaker info, ARK18
300 Seminar 27-6-2018 - Speaker: Goran Čubrić ()
- Title: How to grasp a textile material in automated and robotic production processes
- Abstract:
|
In textile and clothing production processes, a great deal of time goes to handling and manipulating
materials and work pieces. Problems occur due to the characteristic properties of the textile material.
The characteristics and properties of fabrics that have to be considered for successful performance of
textile materials handling, and therefore the efficiency of the grippers are: thickness, low rigidity,
bandwidth, elasticity, capability of retaining the charge, low mass, adhesion force. With regard to the
construction and operation principle, the grippers are limited to certain types of materials and several
processes they can perform.
|
- Links: Speaker info
299 Seminar 14-6-2018 - Speaker: Federico Thomas ()
- Title: A Reconfigurable Asymmetric 3-UPU Parallel Robot
- Abstract:
|
Parallel robots with three UPU legs have received a lot of attention due to the possibility of assembling
these legs so that the robot performs either a pure translational or a pure rotational motion. Nevertheless,
some arrangements, despite their theoretical interest, are of doubtful practical utility due to their
sensitivity to errors and the presence in their workspaces of mixed-modes that involve both translations
and rotations. The introduction of some sort of asymmetry has been revealed of relevance to come up with
more robust designs. In this context, we present an asymmetric 3-UPU robot, that can be reconfigured to
work either as a translational or as a rotational robot by simply flipping upside down its moving platform.
|
- Links: Speaker info, ReMAR18
298 Seminar 10-5-2018 - Speaker: Ricard Bordalba ()
- Title: Randomized Kinodynamic Planning for Constrained Systems
- Abstract:
|
Kinodynamic RRT planners are considered to be general tools for effectively
finding feasible trajectories for high- dimensional dynamical systems. However,
they struggle when holonomic constraints are present in the system, such as
those arising in parallel manipulators, in robots that cooperate to fulfill
a given task, or in situations involving contacts with the environment. In
such cases, the state space becomes an implicitly-defined manifold, which
makes the diffusion heuristic inefficient and leads to inaccurate dynamical
simulations. To address these issues, this paper presents an extension of the
kinodynamic RRT planner that constructs an atlas of the state-space manifold
incrementally, and uses this atlas both to generate random states and to
dynamically steer the system towards such states. To the best of our knowledge,
this is the first randomized kinodynamic planner that explicitly takes holonomic
constraints into account. We validate the approach in significantly-complex systems.
|
- Links: Speaker info, ICRA-18
297 Seminar 3-5-2018 - Speaker: Gerard Canal ()
- Title: Joining high-level symbolic planning with low-level motion primitives in adaptive HRI: application to dressing assistance
- Abstract:
|
For a safe and successful daily living assistance, far from the highly controlled environment
of a factory, robots should be able to adapt to ever-changing situations. Programming such a robot
is a tedious process that requires expert knowledge. An alternative is to rely on a high-level planner,
but the generic symbolic representations used are not well suited to particular robot executions.
Contrarily, motion primitives encode robot motions in a way that can be easily adapted to different
situations. This paper presents a combined framework that exploits the advantages of both approaches.
The number of required symbolic states is reduced, as motion primitives provide smart actions that
take the current state and cope online with variations. Symbolic actions can include interactions
(e.g., ask and inform) that are difficult to demonstrate. We show that the proposed framework can
adapt to the user preferences (in terms of robot speed and robot verbosity), can readjust the
trajectories based on the user movements, and can handle unforeseen situations. Experiments are
performed in a shoe-dressing scenario. This scenario is particularly interesting because it involves
a sufficient number of actions, and the human-robot interaction requires the handling of user preferences
and unexpected reactions.
|
- Links: Speaker info, ICRA-18
296 Seminar 26-4-2018 - Speaker: Joan Solà ()
- Title: Graph SLAM Sparsification with Populated Topologies Using Factor Descent Optimization
- Abstract:
|
Current solutions to the simultaneous localization and mapping (SLAM) problem approach it as the
optimization of a graph of geometric constraints. Scalability is achieved by reducing the size
of the graph, usually in two phases. First, some selected nodes in the graph are marginalized
and then, the dense and non-relinearizable result is sparsified. The sparsified network has
a new set of relinearizable factors and is an approximation to the original dense one.
Sparsification is typically approached as a Kullback-Liebler divergence (KLD) minimization
between the dense marginalization result and the new set of factors. For a simple topology
of the new factors, such as a tree, there is a closed form optimal solution. However, more
populated topologies can achieve a much better approximation because more information can
be encoded, although in that case iterative optimization is needed to solve the KLD
minimization. Iterative optimization methods proposed by the state-of-art sparsification
require parameter tuning which strongly affect their convergence. In this paper, we propose
factor descent and non-cyclic factor descent, two simple algorithms for SLAM sparsification
that match the state-of-art methods without any parameters to be tuned. The proposed methods
are compared against the state of the art with regards to accuracy and CPU time, in both
synthetic and real world datasets.
|
- Links: Speaker info, ICRA-18
295 Seminar 12-4-2018 - Speaker: Victor Vaquero ()
- Title:
- Abstract:
- Links: Speaker info, ICRA-18
294 Seminar 10-4-2018 - Speaker: Leonel Rozo ()
- Title: Robot learning: imitation, refinement and interaction
- Abstract:
|
Learning robot motion and interaction skills has been at the top of the agenda
in robotics research during the last decade. The "Learning and Interaction" group
of the Italian Institute of Technology (IIT) focuses on endowing robots with
advanced manipulation skills and interaction primitives that allow them to
operate in unstructured environments and naturally assist humans in a large
variety of tasks. To achieve this, we exploit several learning modalities:
(1) programming by demonstration, (2) reinforcement learning for incremental
refinement and enhanced generalization, and (3) transfer learning for multi-robot
and multi-task scenarios. Our learning frameworks take advantage of rich multimodal
sensory systems, and extend the robot learning capabilities to variable impedance control,
manipulability transfer, multi-task prioritization, among others. This talk will cover the
recent research of the "Learning and Interaction" group, where both novel learning algorithms
and experimental results will be discussed.
|
- Links: Speaker info
293 Seminar 5-4-2018 - Speaker: Julia Borràs ()
- Title: A Taxonomy of Whole-Body Support Poses for the Analysis of Humanoid Robot Multi-Contact Motions
- Abstract:
|
Locomotion with multi-contacts is an active area of research in humanoid robotics. It refers to locomotion tasks that
use extra supports with the hands or other parts of the body to achieve a better balance or to prevent a fall. For
obvious reasons, such ability could be of great interest for humanoid robots, but it remains a very challenging task
due to the complexity of the problem that includes control strategies beyond the inverted pendulum/ZMP model, very
high dimensional trajectory planning in unstructured environments and complex contact modelling.
During my stay at KIT High Performance Humanoids Lab with Prof. Tamim Asfour, I worked on this problem taking
novel approaches: first, establishing a duality between grasping and whole-body support poses, and secondly
applying learning by observation techniques to the field.
Indeed, there was very little understanding on how humans transition between support contacts when performing
such multi-contact locomotion. Therefore, we first studied how the human body can realize different support poses,
and how can we classificaty and sequence whole-body support poses obtained from human motion recordings. We analyzed
more than 380 motions involving locomotion with multi-contacts, and proposed a taxonomy of whole-body support poses.
During my talk I will present our most relevant results on this topic.
|
- Links: Speaker info
292 Seminar 22-3-2018 - Speaker: Juan Andrade (),
Francesc Moreno (),
LLuis Ros (),
Alberto Sanfeliu ()
- Title: New research projects 2018
- Abstract:
|
In this special seminar, the main objectives of the research projects starting this year will be presented.
The projects are:
|
291 Seminar 15-3-2018 - Speaker: Javier López Milla ()
- Title: Comprehensive Motion Control for Over-Actuated, Non-Affine Aerial Vehicles
- Abstract:
|
Remotely Piloted Aircraft Systems (RPAS) are becoming an important asset for disaster
relief forces, as they can provide a fast scenario overview and even transport a small
amount of vital supplies. RPAS with hybrid capabilities are especially relevant for this
kind of scenarios as they can take off and land vertically in absence of a landing area
as well as fly aerodynamically, enabling long operational airborne time and range.
However, this type of airframes is not easy to operate, as a large set of actuators
must be controlled, along with the need to control unstable configurations (particularly
during transitioning into forward flight). This work proposes a comprehensive motion
control algorithm, which is exemplified in application for a tilt-rotor aircraft
structure. It is based on the implicit function theorem, which allows integrating
the complete set of actuators (motors, control surfaces and tilting nacelles) into
a single controller structure. With this integration the proposed control law can be
seamlessly accommodated into a larger control scheme. In addition, by the derivation
of the control law using the implicit function theorem, the proposed controller has
deterministic properties, while being fully transparent in its mechanization. These
properties are relevant for certification. The proposed talk will present the
derivation of the suggested control law and its application to a tilt-rotor
aircraft, including results using a hardware-in-the-loop simulation.
|
- Links: Speaker info
290 Seminar 1-2-2018 - Speaker: Aleix Martinez ()
- Title: The Face of Emotion: A computational model of the production and visual perception of facial expression of emotion
- Abstract:
|
We now have computer vision algorithms that can successfully detect low-level image features (such as, edges), recover the
3D structure and motion of objects (e.g., SfM), and provide a semantic label for them (e.g., a face, or John’s face).
But how about higher level, abstract concepts like emotions? This talk will introduce the first algorithms to successfully
identify the emotion categories people regularly use to communicate emotion. I will first summarize our research uncovering
the image features used by the human visual system to recognize emotion in faces. I will then explain how these results
can be used to define computer vision systems that can work “in the wild” (i.e., outside controlled, in-lab conditions).
In doing so, I will show the novel finding that people regularly use more than 35 distinct facial expressions (not the six
propound by Darwin). We will see that the major problem in computer vision is that of landmark detection, not recognition,
as is typical of most modern systems.
|
- Links: Speaker info
289 Seminar 20-12-2017 - Speaker: Javier Alonso-Mora ()
- Title: Autonomous Planning and Control for Multi-Robot Systems and Intelligent Transportation
- Abstract:
|
Ubiquitous multi-robot systems require navigation methods
that account for the interaction with other robots and
humans. To enable autonomous operation, I will discuss constrained
optimization methods for collision avoidance and formation control
that apply to both ground and aerial vehicles. These methods model
inter-agent cooperation, moving obstacles and the dynamic constraints
of the robots. I will then show experimental results for self-driving cars,
aerial videography and cooperative mobile manipulation. Furthermore, I
will also describe our interactive display formed by tens of small
robots, and methods for high-level task specification for multi-robot
teams. If time allows, I may briefly describe our recent
results in on-demand high-capacity ride-sharing with large fleets of
self-driving taxis, via a method capable of assigning thousands of
requests to thousands of vehicles and routing them in real-time.
|
- Links: Speaker info
288 Seminar 14-12-2017 - Speaker: Joan Lobo-Prat ()
- Title: Novel Robotic Arm Supports for Young Adults with Duchenne Muscular Dystrophy
- Abstract:
|
Young adults with Duchenne musuclar dystrophy (DMD) have limited or no arm function
due to severe muscular weakness. While their life expectancy has considerably increased
over the last five decades, their quality of life remains poor. Currently, a considerable
group of people with DMD live into their 30’s with a strong dependency on care and restrictions
to participate in social activities. Assistive technologies play a key role in increasing the
quality of life for adults with DMD by enabling them to independently perform activities of
daily living. The seminar presents the development and evaluation of novel arm supports for
people with DMD that have been developed within the
Flextension A-Gear project. Special attention
is given to the development of the control
interfaces as they are a critical component of robotic arm supports responsible for
the human-machine interaction. We developed myoelectric and force-based admittance
control interfaces, which detect motion intention from physiological signals implicitly
related to the supported motion, resulting in natural and intuitive interaction with
the robotic arm support.
|
- Links: Speaker info
287 Seminar 13-12-2017 - Speaker: Santiago Mazuelas ()
- Title: Rational data processing in complex networks
- Abstract:
|
Data has been shown to be an extremely useful resource in many fields including
communications, information technology, weather forecasting, and economics. Data processing
techniques developed under paradigms such as machine learning, data science, and Bayesian
inference are enabling many critical applications. In each specific application, data can
reduce the uncertainty on the consequences of possible actions and hence improve decision
making. For instance, certain key words in an email reduce the uncertainty regarding email
usefulness and, hence, improve spam filtering.
Rational decision making that is consistent with preferences among consequences requires a
probabilistic processing of data. Such probabilistic framework for data processing encounters
several technical difficulties including 1) modeling of complex data, 2) approximation of
intractable computations, and 3) efficiency in high dimensions. In this talk,
I will provide an overview of such probabilistic framework and describe techniques to overcome
the above-mentioned difficulties. In addition, I will show the practical benefits of the techniques
presented through the case study of network localization and navigation.
|
- Links: Speaker info
286 Seminar 30-11-2017 - Speaker: Aleksandar Jevtić ()
- Title:
- Abstract:
- Links: Speaker info
285 Seminar 16-11-2017 - Speaker: Ely Repiso ()
- Title: On-line adaptive side-by-side human robot companion to approach a moving person to interact
- Abstract:
|
In this paper, we present an on-line adaptive side-by-side human-robot companion to approach a moving person
to interact with. Our framework makes the pair robot-human capable of overpass, in a joint way, the dynamic
and static obstacles of the environment while they reach a moving goal, which is the person who wants to
interact with the pair. We have defined a new moving final goal that depends on the environment, the
movement of the group and the movement of the interacting person. Moreover, we modified the Extended Social
Force model to include this new moving goal. The method has been validated over several situations in simulation.
|
- Links: Speaker info
284 Seminar 9-11-2017 - Speaker: Anaís Garrell ()
- Title: Aerial Social Force Model: A new framework to accompany people using autonomous flying robots
- Abstract:
|
We proposed a novel Aerial Social Force Model (ASFM) that allows autonomous flying robots to accompany
humans in urban environments in a safe and comfortable manner. To date, we are not aware of other
state-of-the-art method that accomplish this task. The proposed approach is a 3D version of the Social
Force Model (SFM) for the field of aerial robots which includes an interactive human-robot navigation
scheme capable of predicting human motions and intentions so as to safely accompany them to their final
destination. ASFM also introduces a new metric to fine-tune the parameters of the force model, and to
evaluate the performance of the aerial robot companion based on comfort and distance between the robot
and humans. The presented approach is extensively validated in diverse simulations and real experiments,
and compared against other similar works in the literature. ASFM attains remarkable results and shows that
it is a valuable framework for social robotics applications, such as guiding people or human-robot interaction.
|
- Links: Speaker info
283 Seminar 19-10-2017 - Speaker: Alejandro Hernández ()
- Title: 3D CNNs on Distance Matrices for Human Action Recognition
- Abstract:
|
In this paper we are interested in recognizing human actions from sequences of 3D skeleton data.
For this purpose we combine a 3D Convolutional Neural Network with body representations based on
Euclidean Distance Matrices (EDMs), which have been recently shown to be very effective to capture
the geometric structure of the human pose. One inherent limitation of the EDMs, however, is that
they are defined up to a permutation of the skeleton joints, i.e., randomly shuffling the ordering
of the joints yields many different representations. In oder to address this issue we introduce a
novel architecture that simultaneously, and in an end-to-end manner,learns an optimal transformation
of the joints, while optimizing the rest of parameters of the convolutional network. The proposed
approach achieves state-of-the-art results on 3 benchmarks, including the recent NTU RGB-D dataset,
for which we improve on previousLSTM-based methods by more than 10 percentage points, also surpassing
other CNN-based methods while using almost 1000 times fewer parameters.
|
- Links: Speaker info, ACM MM
282 Seminar 5-10-2017 - Speaker: Victor Vaquero ()
- Title: Deconvolutional Networks for Point-Cloud Vehicle Detection and Tracking in Driving Scenarios
- Abstract:
|
Vehicle detection and tracking is a core ingredient for developing autonomous driving applications in
urban scenarios. Recent image-based Deep Learning (DL) techniques are obtaining breakthrough results in
these perceptive tasks. However, DL research has not yet advanced much towards processing 3D point clouds
from lidar range-finders. These sensors are very common in autonomous vehicles since, despite not providing
as semantically rich information as images, their performance is more robust under harsh weather conditions
than vision sensors. In this paper we present a full vehicle detection and tracking system that works with 3D
lidar information only. Our detection step uses a Convolutional Neural Network (CNN) that receives as input a
featured representation of the 3D information provided by a Velodyne HDL-64 sensor and returns a per-point
classification of whether it belongs to a vehicle or not. The classified point cloud is then geometrically
processed to generate observations for a multi-object tracking system implemented via a number of Multi-Hypothesis
Extended Kalman Filters (MH-EKF) that estimate the position and velocity of the surrounding vehicles. The system
is thoroughly evaluated on the KITTI tracking dataset, and we show the performance boost provided by our CNN-based
vehicle detector over a standard geometric approach. Our lidar-based approach uses about a 4% of the data needed
for an image-based detector with similarly competitive results.
|
- Links: Speaker info
281 Seminar 28-7-2017 - Speaker: Ignasi Clavera ()
- Title: Policy Transfer via Modularity and Rewad Guiding
- Abstract:
|
Non-prehensile manipulation, such as pushing, is an important function for robots to move objects
and is sometimes preferred as an alternative to grasping. However, due to unknown frictional forces,
pushing has been proven a difficult task for robots. We explore the use of reinforcement learning to
train a robot to robustly push an object. In order to deal with the sample complexity of training
such a method, we train the pushing policy in simulation and then transfer this policy to the real world.
In order to ease the transfer from simulation, we propose to use modularity to separate the learned
policy from the raw inputs and outputs; rather than training end-to-end, we decompose our system into
modules and train only a subset of these modules in simulation. We further demonstrate that we can
incorporate prior knowledge about the task into the state space and the reward function to speed up
convergence. Finally, we introduce reward guiding to modify the reward function and further reduce
the training time. We demonstrate, in both simulation and real-world experiments, that such an
approach can be used to reliably push an object from many initial positions and orientations.
|
- Links: Speaker info
280 Seminar 27-7-2017 - Speaker: Ricard Bordalba ()
- Title: Randomized Kinodynamic Planning for Cable-suspended Parallel Robots
- Abstract:
|
This paper proposes the use of a randomized kinodynamic planning technique
to synthesize dynamic motions for cable-suspended parallel robots. Given
two mechanical states of the robot, both with a prescribed position and
velocity, the method attempts to connect them by a collision-free
trajectory that respects the joint and force limits of the actuators,
keeps the cables in tension, and takes the robot dynamics into account.
The method is based on the construction of a bidirectional rapidly-exploring
random tree over the state space. Remarkably, the technique can be used to
cross forward singularities of the robot in a predictable manner, which
extends the motion capabilities beyond those demonstrated in previous work.
The paper describes experiments that show the performance of the method in
point-to-point operations with specific cable-driven robots, but the overall
strategy remains applicable to other mechanism designs.
|
- Links: Speaker info,
CableCon2017
279 Seminar 20-7-2017 - Speaker: Anna Vera ()
- Title: Robot assisted assessment and training: multimodal feedback approach to promote human sensorimotor learning
- Abstract:
|
Rehabilitation and clinical studies focused almost exclusively on improving
motor outcomes. However, in the last decade, there has been a growing interest
in sensory feedback processing, in the contribution of sensory information for
motor control and in its role in fostering neural plasticity through learning.
In order to substitute or enhance sensory information, the use of external
sensory feedback based on robotic device is promising. This approach results
beneficial for motor outcomes, but it is not yet proved if such improvement
is concurrent with sensory function modification and, in particular, whether
such effect involves one of the most important sensory source for movement
control, i. e. proprioception. This talk will provide the evidence for the
beneficial effect of multimodal feedback-based robot assisted training on
sensorimotor functions. In particular, I will propose a system of human-robot
interaction where a mutual information is shared by using different feedback
modalities, such as haptic, vibro-tactile and visual feedback, presenting
related somatosensory and motor function changes and the consequent
retention. The multimodal feedback approach enhances somatosensory and
motor learning and may thus become an effective behavioral intervention
for treating movement disorders.
|
- Links: Speaker info
278 Seminar 11-7-2017 - Speaker: Jingang Yi ()
- Title: Robotics Research at RAM Lab of Rutgers University
- Time: 10:00
- Place: Meeting room floor -1
- Abstract:
|
In this talk, I will review recent robotics research activities at the Robotics,
Automation and Mechatronics (RAM) Lab at Rutgers University. These research
activities and projects represent many current research trends in robotics
and automation and mechatronics areas. In the first part of the talk, I
will discuss our research in the autonomous robotics and navigation areas,
such as human-inspired autonomous aggressive driving for active vehicle
safety control, autonomous robotic technologies for non-destructive bridge
deck inspection and rehabilitation, etc. In the second part of the talk,
I will present our studies on understanding and control of physical
human-robot interactions and its potential applications in healthcare
and rehabilitation engineering for human postural disability patients.
I will also report some other projects in robotics and automation areas
at the RAM Lab at Rutgers.
|
- Links: Speaker info
277 Seminar 19-5-2017 - Speaker: Jérémie Deray ()
- Title: Word Ordering and Document Adjacency for Large Loop Closure Detection in 2D Laser Maps
- Abstract:
|
We address in this paper the problem of loop closure detection for laser-based simultaneous localization
and mapping (SLAM) of very large areas. Consistent with the state of the art, the map is encoded as a graph
of poses, and to cope with very large mapping capabilities, loop closures are asserted by comparing the
features extracted from a query laser scan against a previously acquired corpus of scan features using
a bag-ofwords (BoW) scheme. Two contributions are here presented. First, to benefit from the graph topology,
feature frequency scores in the BoW are computed not only for each individual scan but also from neighboring
scans in the SLAM graph. This has the effect of enforcing neighbor relational information during document
matching. Secondly, a weak geometric check that takes into account feature ordering and occlusions is
introduced that substantially improves loop closure detection performance. The two contributions are
evaluated both separately and jointly on four common SLAM datasets, and are shown to improve the
state-of-the-art performance both in terms of precision and recall in most of the cases. Moreover,
our current implementation is designed to work at nearly frame rate, allowing loop closure query
resolution at nearly 22 Hz for the best case scenario and 2 Hz for the worst case scenario.
|
- Links: Speaker info, ICRA2017
276 Seminar 4-5-2017 - Speaker: Lorenzo Porzi ()
- Title: Learning Depth-aware Deep Representations for Robotic Perception
- Abstract:
|
Exploiting RGB-D data by means of convolutional neural networks (CNNs) is at
the core of a number of robotics applications, including object detection, scene
semantic segmentation, and grasping. Most existing approaches, however, exploit
RGB-D data by simply considering depth as an additional input channel for the
network. In this paper we show that the performance of deep architectures can be
boosted by introducing DaConv, a novel, general-purpose CNN block which exploits
depth to learn scale-aware feature representations. We demonstrate the benefits of
DaConv on a variety of robotics oriented tasks, involving affordance detection,
object coordinate regression, and contour detection in RGB-D images. In each of
these experiments we show the potential of the proposed block and how it can be
readily integrated into existing CNN architectures.
|
- Links: Speaker info, ICRA2017
275 Seminar 27-4-2017 - Speaker: Albert Pumarola ()
- Title: PL-SLAM: Real-Time Monocular Visual SLAM with Points and Lines
- Abstract:
|
Low textured scenes are well known to be one of the main Achilles heels of
geometric computer vision algorithms relying on point correspondences, and in
particular for visual SLAM. Yet, there are many environments in which, despite
being low textured, one can still reliably estimate line-based geometric
primitives, for instance in city and indoor scenes, or in the so-called
Manhattan worlds, where structured edges are predominant. In this paper we
propose a solution to handle these situations. Specifically, we build upon ORB-SLAM,
presumably the current state-of-the-art solution both in terms of accuracy as efficiency,
and extend its formulation to simultaneously handle both point and line correspondences.
We propose a solution that can even work when most of the points are vanished out from
the input images, and, interestingly it can be initialized from solely the detection of
line correspondences in three consecutive frames. We thoroughly evaluate our approach and
the new initialization strategy on the TUM RGB-D benchmark and demonstrate that the use of
lines does not only improve the performance of the original ORB-SLAM solution in poorly
textured frames, but also systematically improves it in sequence frames combining points
and lines, without compromising the efficiency.
|
- Links: Speaker info, ICRA2017
274 Seminar 25-4-2017 - Speaker: Martin Saska ()
- Title: Cooperating groups of micro aerial vehicles: from theory and applications to our successful participation in the MBZIRC competition
- Abstract:
|
Deployment of teams of Micro Aerial Vehicles (MAVs) in real world environments independently to
precise motion capture systems (such as Vicon) is a subsequent step in current hectic research
in the field of autonomous flying systems. The aim of this talk is to present latest results
in our endeavor towards fully autonomous compact flocks of MAVs, which were achieved by the
Multi-robot Systems group. Stabilization, control and motion
planning techniques for steering swarms and formations of autonomous MAVs will be
discussed with a focus on bio-inspired techniques that integrate swarming abilities
of individual particles with a Model Predictive Control (MPC) methodology. Besides
the basic principles of formation flying and swarm stabilization, examples of real-world
applications of the introduced methods will be shown, including indoor documentation of
large historical objects (churches) by
formations of cooperating MAVs.
Finally, a description of the system used in Mohamed Bin Zayed International Robotics Challenge
(MBZIRC 2017), where our team won gold medals in the third challenge, silver medals in the first
challenge and bronze medals in the GRAND-challenge, will be described together with our experience
from the competition. MBZIRC is an international robotics competition
organized every two years in Abu Dhabi by Sheikh Hamed Bin Zayed Al Nahyan with total prize-money
and team sponsorship of USD 5 Million, which attracts the best robotic universities in the world
(143 teams applied for participation in the contest).
Our team participated in the Challenge 1, an
autonomous landing of an MAV on a moving vehicle, and the Challenge 3, in which three cooperating
MAVs search, locate, track, pick and place a set of static and moving objects.
|
- Links: Speaker info
273 Seminar 20-4-2017 - Speaker: Javier Romero ()
- Title: Creating and exploiting data-driven human body models
- Abstract:
|
Perception of people around us is a crucial part of everybody’s daylife.
People’s analysis is not limited to parsing the current scene, including
the posture and shape of humans in it. We can also imagine their appearance
few seconds later, or how each individual would look like when performing a
completely different motion or when gaining a few kilos.
The main goal of my research is to provide these reasoning capabilities to a
computer. To achieve this, we believe it is essential to have a computational
model of human visual appearance. In this talk, I’ll give an overview of three
challenges related to this topic that I have explored in recent years. The first
one is to develop compact models of the geometry of human bodies from registered
3D scans, that can extrapolate to new poses, new shapes and new dynamic motions.
Second, I will discuss how these models enable three different modalities of inference:
fitting different data modalities in a generative manner, generating synthetic data for
discriminative methods, and enabling weak supervision. Finally, the use of these models
as an introspection tool for studying our own human perception of bodies will be described.
|
- Links: Speaker info
272 Seminar 30-3-2017 - Speaker: Angel Santamaria ()
- Title: Trajectory Generation for Unmanned Aerial Manipulators through Quadratic Programming
- Abstract:
|
In this paper a trajectory generation approach using quadratic programming is
described for aerial manipulation, i.e. for the control of an aerial vehicle
equipped with a robot arm. The proposed approach applies the online active set
strategy to generate a feasible trajectory of the joints, in order to accomplish
a set of tasks with defined bounds and constraint inequalities. The definition of
the problem in the acceleration domain allows to integrate and perform a large
set of tasks and, as a result, to obtain smooth motion of the joints. A
weighting strategy, associated with a normalization procedure, allows to
easily define the relative importance of the tasks. This approach is useful
to accomplish different phases of a mission with different redundancy resolution
strategies. The performance of the proposed technique is demonstrated through real
experiments with all the algorithms running onboard in real time. In particular,
the aerial manipulator can successfully perform navigation and interaction phases,
while keeping motion within prescribed bounds and avoiding collisions with external
obstacles.
|
- Links: Speaker info, ICRA2017
271 Seminar 13-2-2017 - Speaker: Jordi Pont-Tuset ()
- Title: One-Shot Video Object Segmentation
- Abstract:
|
In this talk I’ll present our recent work
on semi-supervised video object segmentation, i.e., the separation of an
object from the background in a video, given the mask of the first frame. We
present One-Shot Video Object Segmentation (OSVOS), based on a fully-convolutional
neural network architecture that is able to successively transfer generic semantic
information, learned on ImageNet, to the task of foreground segmentation, and
finally to learning the appearance of a single annotated object of the test
sequence (hence one-shot). Although all frames are processed independently, the
results are temporally coherent and stable. We perform experiments on three
annotated video segmentation databases, which show that OSVOS is fast and
improves the state of the art by a significant margin (79.8% vs 68.0%).
|
- Links: Speaker info
270 Seminar 26-1-2017 - Speaker: Beta-Robots ()
- Title: Boosting robotics research towards the market
- Abstract:
|
Beta Robots is a start-up company that provides expertise and project
execution on robotics and artificial perception systems. The company
was founded by three former IRI members who finished their PhD degrees
some years ago, in the domains of mobile robots navigation, grasp planning
and kinematics. Beta Robots main purpose is to boost state of the art research
results to operational prototypes close to the market needs and constraints,
especially, but not limited to, the field of robotics. This provides the
customers with resources to move forward their technological aspirations.
The talk will overview Beta Robots’ current projects and will share the
company vision, as well as discuss personal insights about the hot
start-up environment in the robotics field.
|
- Links: Speaker info
269 Seminar 12-1-2017 - Speaker: Jan Funke ()
- Title: The CREMI Challenge -- Neural Circuit Reconstruction from Electron Microscopy Images
- Abstract:
|
The reconstruction of neural circuits from model organisms like
Drosophila melanogaster is a key step for gaining new insights into the
function of nervous systems. Currently, only electron microscopy
provides the resolution to resolve synaptic connections. Given the huge
amounts of data acquired for even small animals, computer vision methods
are needed to segment neurons and find their synaptic connections.
Despite successful efforts for the segmentation of neurons, the
automatic identification of synaptic partners--and thus neural
circuits--has largely been ignored, so far.
Here, we present the first results of a challenge that we organize to
foster contributions of the computer vision community to reconstruct
neural circuits. The challenge provides six large volumes of electron
microscopy data, with complete annotations for neurons, synapses, and
synaptic partners. We present contributions made for each category and
introduce the best approaches, which were also awarded at the MICCAI
2016 conference. Furthermore, we discuss the future of the challenge and
the potential impact on neuroscientific research.
|
- Links: Speaker info
268 Seminar 1-12-2016 - Speaker: Brais Cancela ()
- Title: A dynamic scene modeling approach to model human behavior in crowded scenes
- Abstract:
|
Human behavior analysis is one of the most active computer vision research fields.
As the number of cameras are increased, especially in restricted environments,
like airports, train stations or museums, the need of automatic systems that can
catalog the information provided by the cameras becomes crucial. In the case of
crowded scenes, it is very difficult to distinguish people behavior because of the
lack of visual contact of the whole body. Thus, behavior analysis remains in the
evaluation of trajectories, adding high-level knowledge approaches in order to use
that information in several applications like video surveillance or traffic analysis.
A novel behavior analysis system, which includes information about the environment,
is provided. It is based in the idea that every person tries to reach a goal in the
scene following the same path the majority of people should use.
|
- Links: Speaker info
267 Seminar 3-11-2016 - Speaker: Jesús Bermúdez ()
- Title: Minimal solutions for line fitting in omnidirectional vision
- Abstract:
|
The original purpose of omnidirectional cameras is to increase the field of view (FOV)
of cameras. In particular when considering line features the purpose is increasing the
visibility of the projected segments. However due to nature of line projection it is
also possible to estimate the calibration of the system and in the case of non-central
cameras, reconstructing 3D lines from a single view. This talk is focused on the
geometry of line projections (line-images) in omnidirectional systems. More in
detail we present a set of minimal solutions for dealing with line-features extraction,
calibration and 3D reconstruction.
|
- Links: Speaker info
266 Seminar 20-10-2016 - Speaker: Edgar Simo ()
- Title: Fusing Global and Local Image Priors for Automatic Image Colorization
- Abstract:
|
We present a novel technique to automatically colorize grayscale images that combines both
global priors and local image features. Based on Convolutional Neural Networks, our deep
network features a fusion layer that allows us to elegantly merge local information
dependent on small image patches with global priors computed using the entire image.
The entire framework, including the global and local priors as well as the colorization
model, is trained in an end-to-end fashion. Furthermore, our architecture can process
images of any resolution, unlike most existing approaches based on CNN. We leverage
an existing large-scale scene classification database to train our model, exploiting
the class labels of the dataset to more efficiently and discriminatively learn the
global priors. We validate our approach with a user study and compare against the
state of the art, where we show significant improvements. Furthermore, we
demonstrate our method extensively on many different types of images,
including black-and-white photography from over a hundred years ago, and
show realistic colorizations.
|
- Links: Speaker info
265 Seminar 4-7-2016 - Speaker: Xavier Alameda-Pineda ()
- Title: Matrix Completion: A vision-oriented perspective
- Abstract:
|
Matrix completion is a generic framework aiming to recover a matrix from a limited
number of (possibly noisy) entries. In this content, low-rank regularizers are often
imposed so as to find matrix estimators that are robust to noise and outliers. In
this talk I will discuss three recent advances on matrix completion, developed to
solve three different vision applications. First, coupled matrix completion to
solve joint head and body pose estimation. Second, non-linear matrix completion
to recognize emotions from abstract paintings. Third, self-adaptive matrix
completion for remote heart-rate estimation from videos.
|
- Links: Speaker info
264 Seminar 30-6-2016 - Speaker: Antonio Agudo ()
- Title: Reconstructing a dynamic world
- Abstract:
|
The simultaneous 3D reconstruction of rigid structures and the camera motion
using a set of uncalibrated images has been extensively studied over the last
few decades.
The rigidity prior has proven to be a powerful constraint to solve the problem,
allowing practical and robust solutions. However, rigid reconstruction techniques
fail when applied directly to time-deforming objects such as a piece of cloth or
a beating heart. In this talk, I will discuss the non-rigid case and present
some results on real video sequences.
|
- Links: Speaker info
263 Seminar 16-6-2016 - Speaker: Edmundo Guerra ()
- Title: Data association and validation for probabilistic localization and mapping
- Abstract:
|
The development of fully autonomous robots still presents several challenges. One of these problems is
the perception and interpretation of previously unknown environments and spatial relationships between
landmarks, known simultaneous localization and mapping problem. The SLAM problem has typically been
addressed from a probabilistic approach, with its roots on filtering techniques. To measure landmarks
and proceed with the iterative improvement of the map, said landmarks need to be detected and identified
on subsequent measurements, presenting the data association problem. This problem is has many solutions
dependent on specific type of sensors, though most of them rely on the implementation of a validation
gate in order to detect/prune incorrect associations that can disrupt the map. In this presentation,
the most common data association techniques used for filter-based SLAM are reviewed, and results
obtained with a derivate of the Joint Compatibility Branch and Bound technique are presented.
|
- Links: Speaker info
262 Seminar 9-6-2016 - Speaker: David Martínez ()
- Title: Learning Relational Dynamics of Stochastic Domains for Planning
- Abstract:
|
Probabilistic planners are very flexible tools that can provide good solutions for difficult tasks.
However, they rely on a model of the domain, which may be costly to either hand code or automatically
learn for complex tasks. We propose a new learning approach that (a) requires only a set of state
transitions to learn the model; (b) can cope with uncertainty in the effects; (c) uses a relational
representation to generalize over different objects; and (d) in addition to action effects, it can
also learn exogenous effects that are not related to any action, e.g., moving objects, endogenous
growth and natural development. The proposed learning approach combines a multi-valued variant of
inductive logic programming for the generation of candidate models, with an optimization method
to select the best set of planning operators to model a problem. Finally, experimental validation
is provided that shows improvements over previous work.
|
- Links: Speaker info, ICAPS-16
261 Seminar 2-6-2016 - Speaker: Germán Ros ()
- Title: Semantic Segmentation for Driving Scenarios: On virtual worlds and embedded platforms
- Abstract:
|
This talk addresses some of the current challenges of semantic segmentation of driving environments, with focus
on how to exploit virtual worlds to boost the accuracy and generalization capabilities of new models while we
try to constraints these models to fit in embedded systems. When one aims for developing systems capable of
running in real driving environments there are critical questions to solve, ranging from the size of the
models (that need to be loaded on a chip with severe memory constraints) to the accuracy of the model for
new unseen domains (i.e., new cities). Is it possible to have a compact model with state-of-the-art accuracy
but small enough to operate on a chip? Are state-of-the-art approaches good enough to be used in autonomous
driving? What are the current limitations of these systems? Are virtual worlds really useful? These are
some of the questions addressed by this talk.
|
- Links: Speaker info
260 Seminar 12-5-2016 - Speaker: Farzad Husain ()
- Title: Combining Semantic and Geometric Features for Object Class Segmentation of Indoor Scenes
- Abstract:
|
Scene understanding is a necessary prerequisite for robots acting autonomously in complex environments. Low-cost RGB-D
cameras such as Microsoft Kinect enabled new methods for analyzing indoor scenes and are now ubiquitously used in indoor
robotics. We investigate strategies for efficient pixelwise object class labeling of indoor scenes that combine both
pretrained semantic features transferred from a large color image dataset and geometric features, computed relative
to the room structures, including a novel distance-from-wall feature, which encodes the proximity of scene points to
a detected major wall of the room. We evaluate our approach on the popular NYU v2 dataset. Several deep learning models
are tested, which are designed to exploit different characteristics of the data. This includes feature learning with two
different pooling sizes. Our results indicate that combining semantic and geometric features yields significantly improved
results for the task of object class segmentation.
|
- Links: Speaker info, ICRA-16
- Speaker: Farzad Husain ()
- Title: Action Recognition based on Efficient Deep Feature Learning in the Spatio-Temporal Domain
- Abstract:
|
Hand-crafted feature functions are usually designed based on the domain knowledge of a presumably controlled environment and often
fail to generalize, as the statistics of real-world data cannot always be modeled correctly. Data-driven feature learning methods,
on the other hand, have emerged as an alternative that often generalize better in uncontrolled environments. We present a simple,
yet robust, 2D convolutional neural network extended to a concatenated 3D network that learns to extract features from the
spatio-temporal domain of raw video data. The resulting network model is used for content-based recognition of videos. Relying
on a 2D convolutional neural network allows us to exploit a pretrained network as a descriptor that yielded the best results on
the largest and challenging ILSVRC-2014 dataset. Experimental results on commonly used benchmarking video datasets demonstrate
that our results are state-of-the-art in terms of accuracy and computational time without requiring any preprocessing
(e.g., optic flow) or a priori knowledge on data capture (e.g., camera motion estimation), which makes it more general and
flexible than other approaches. Our implementation is made available.
|
- Links: Speaker info, ICRA-16
Seminar 5-5-2016 - 259 Speaker: Andreu Corominas ()
- Title: Observability Analysis and Optimal Sensor Placement in Stereo Radar Odometry
- Abstract:
|
Localization is the key perceptual process closing
the loop of autonomous navigation, allowing self-driving vehicles
to operate in a deliberate way. To ensure robust localization,
autonomous vehicles have to implement redundant estimation
processes, ideally independent in terms of the underlying
physics behind sensing principles. This paper presents a stereo
radar odometry system, which can be used as such a redundant
system, complementary to other odometry estimation processes,
providing robustness for long-term operability. The presented
work is novel with respect to previously published methods in
that it contains: (i) a detailed formulation of the Doppler error
and its associated uncertainty; (ii) an observability analysis that
gives the minimal conditions to infer a 2D twist from radar
readings; and (iii) a numerical analysis for optimal vehicle
sensor placement. Experimental results are also detailed that
validate the theoretical insights.
|
- Links: Speaker info, ICRA-16
- 258 Speaker: Patrick Grosch ()
- Title: Geometric Path Planning without Maneuvers for Non-Holonomic Parallel Orienting Robots
- Abstract:
|
Current geometric path planners for nonholonomic
parallel orienting robots generate maneuvers consisting
of a sequence of moves connected by zero-velocity points.
The need for these maneuvers restrains the use of this kind
of parallel robots to few applications. Based on a rather old
result on linear time-varying systems, this paper shows that
there are infinitely differentiable paths connecting two arbitrary
configurations in SO(3) such that the instantaneous axis of
rotation along the path rest on a fixed plane. This theoretical
result leads to a practical path planner for non-holonomic
parallel orienting robots that generates single-move maneuvers.
To present this result, we start with a path planner based on
three-move maneuvers, and then we proceed by progressively
reducing the number of moves to one, thus providing a unified
treatment with respect to previous geometric path planners.
|
- Links: Speaker info, ICRA-16
257 Seminar 13-4-2016 - Speaker: Aleix Martínez ()
- Title: My Adventured with Bayes: In search of optimal solutions in machine learning, computer vision and beyond
- Abstract:
|
The Bayes criterion is generally regarded as the holy grail in classification because, for known distributions, it leads to the
smallest possible classification error. Unfortunately, the Bayes classification boundary is generally nonlinear and its associated
error can only be calculated under unrealistic assumptions. In this talk, we will show how these obstacles can be readily and
efficiently averted yielding Bayes optimal algorithms in machine learning, statistics, computer vision and other areas of
scientific inquiry. In this journey, we will extend the notion of homoscedasticity (meaning of the same variance) to
spherical-homoscedasticity (meaning of the same variance up to a rotation) and show how this allows us to generalize
the Bayes criterion under more realistic assumptions. This will lead to a new concept of kernel mappings with applications
in classification (machine learning), shape analysis (statistics), structure from motion (computer vision), and others.
We will then define other optimization criteria where Bayes cannot be readily applied and define the use of kernels in
labeled graphs.
|
- Links: Speaker info
256 Seminar 7-4-2016 - Speaker: Adrià Colomé ()
- Title: Using bad data for Reinforcement Learning with Policy Search algorithms to obtain better convergence to solutions
- Abstract:
|
In the field of Policy Search, a type Reinforcement Learning, the usual approach is to obtain new policies from experimentation,
where only the good data samples with high reward have a signifficant effect on the policy update. In this presentation, we will
briefly do an overview of one of the most popular policy search algorithms: Relative Entropy Policy Search, and a new
generalization of it putting emphasis on using bad data to improve the solutions obtained.
|
- Links: Speaker info
Seminar 10-3-2016 - Speaker: Joan Solà ()
- Title: WOLF: a versatile framework for localization and mapping
- Abstract:
|
The problem of robot localization in unknown environments is central in mobile robotics.
It is essential for undertaking almost any kind of task requiring motion. Enriching it
with mapping capabilities is almost as important: the robot can then plan its movements
according to the environment, either making use of it, or avoiding the objects in it.
In robotics, such problems fall into two major categories: Odometry, where one integrates
motions to obtain an estimate of the current position, and SLAM (simultaneous localization
and mapping), where one builds a map of the environment, useful both for relocalizing and
motion planning. Odometry and SLAM systems share a great deal of common pieces.
The effort required to build such systems is very often enormous, and encompasses the mastering
of a great deal of complex techniques, that range from sensor data processing (e.g. computer
vision), to advanced estimation solvers for huge non-linear problems (e.g. incremental Cholesky
factorization).
Our goal is to provide a proper framework for building good localization systems, by building on
top of great work made by other contributors, therefore allowing the engineering of localization
solutions for a vast diversity of projects, both at IRI and elsewhere.
Together with some collaborators at LAAS-CNRS, we are preparing at IRI a general framework,
called WOLF, for solving suck kind of problems. Wolf is general mainly in three senses:
* One can configure a robotic system with virtually any number of sensors, of any kind, and have
them either synchronized or not. One may be interested, also, in auto-calibrating the set of
sensors, especially with respect to their extrinsic parameters (to speed up sensor installation),
but also the intrinsic ones.
* One can use different engines for solving the problem, from the classical EKF to the advanced
incremental solvers using non-linear optimization.
* One can be doing odometry or SLAM.
The basic Wolf structure is a tree of base classes reproducing the elements of the robotic problem.
This is called the Wolf Tree. It has a robot, with sensors, with a trajectory formed by keyframes,
and the map with its landmarks. Each sensor is equipped with processors allowing automatic processing
of the received raw data. These base classes can be derived to build the particularizations you want:
Wolf provides the basic functionality in the base classes, and you add what you want on top.
Wolf can be used within ROS for an easy integration. We provide examples of ROS nodes using Wolf.
Wolf can also be used in other robotics frameworks.
|
- Links: Speaker info
254 Seminar 15-2-2016 - Speaker: Javier Civera ()
- Title: Mid and high-level features for dense monocular SLAM
- Abstract:
|
The traditional focus of visual SLAM has been the geometric model of point-based
features; and only recently a more semantic understanding and the modelling of
scene priors has gained relevance in the community. Learning and understanding
patterns beyond a local geometric/photometric scope opens the door to a wider
array of applications and improves the performance of the traditional methods.
In this talk I will review some of the most relevant papers and my own work in
this direction, highlighting the improvements and current limitations of
mid-level and high-level scene features in the visual SLAM domain.
|
- Links: Speaker info
253 Seminar 17-12-2015 - Speaker: Francesc Serratosa ()
- Title: Machine Learning, Human Interaction and Graph Matching applied to Mobile Robots
- Abstract:
|
In this seminar, we show how we have put together machine learning and graph matching to deduct the
position of mobile robots in a semi-automatic way and considering the input of robots is only their
embedded cameras. First, we are going to explain how machine-learning techniques have been applied
to graph matching to increase the quality of the final node-to-node correspondence and also, how
human interactivity has been applied in the process of matching two attributed graphs. Then, we are
going to present a system that is able to deduct the position of some cameras given their images and
also some human interaction. This system is based on well-known feature extraction and structure from
motion methods. Moreover, we have used the previously commented learning techniques, cooperative pose
estimation and human interaction.
|
- Links: Speaker info
252 Seminar 26-11-2015 - Speaker: Sergi Foix ()
- Title: 3D Sensor planning framework for leaf probing
- Abstract:
|
Modern plant phenotyping requires active sensing technologies and particular exploration strategies.
This article proposes a new method for actively exploring a 3D region of space with the aim of localizing
special areas of interest for manipulation tasks over plants. In our method, exploration is guided by a
multi-layer occupancy grid map. This map, together with a multiple-view estimator and a maximum
information-gain gathering approach, incrementally provides a better understanding of the scene until
a task termination criterion is reached.
This approach is designed to be applicable for any task entailing 3D object exploration where some previous
knowledge of its general shape is available. Its suitability is demonstrated here for an eye-in-hand arm
configuration in a leaf probing application.
|
- Links: Speaker info, IROS-15
251 Seminar 16-11-2015 - Speaker: Victor Vaquero ()
- Title: Real Time People Detection Combining Appearance and Depth Image Spaces using Boosted Random Ferns
- Abstract:
|
This paper presents a robust and real-time method for people
detection in urban and crowed environments. Unlike other conventional
methods which either focus on single features or compute multiple and
independent classifiers specialized in a particular feature space, the pro-
posed approach creates a synergic combination of appearance and depth
cues in a unique classifier. The core of our method is a Boosted Random
Ferns classifier that selects automatically the most discriminative local
binary features for both the appearance and depth image spaces. Based
on this classifier, a fast and robust people detector which maintains high
detection rates in spite of environmental changes is created.
The proposed method has been validated in a challenging RGB-D database
of people in urban scenarios and has shown that outperforms state-of-
the-art approaches in spite of the difficult environment conditions. As a
result, this method is of special interest for real-time robotic applications
where people detection is a key matter, such as human-robot interaction
or safe navigation of mobile robots for example..
|
- Links: Speaker info, ROBOT-15
- Speaker: Victor Vaquero ()
- Title: Low Cost, Robust and Real Time System for Detecting and Tracking Moving Objects to Automate Cargo Handling in Port Terminals
- Abstract:
|
The presented paper addresses the problem of detecting and
tracking moving objects for autonomous cargo handling in port terminals
using a perception system which input data is a single layer laser scanner.
A computationally low cost and robust Detection and Tracking Moving
Objects (DATMO) algorithm is presented to be used in autonomous
guided vehicles and autonomous trucks for efficient transportation of
cargo in ports. The method first detects moving objects and then tracks
them, taking into account that in port terminals the structure of the
environment is formed by containers and that the moving objects can
be trucks, AGV, cars, straddle carriers and people among others. Two
approaches of the DATMO system have been tested, the first one is
oriented to detect moving obstacles and focused on tracking and filtering
those detections; and the second one is focused on keepking targets when
no detections are provided. The system has been evaluated with real data
obtained in the CTT port terminal in Hengelo, the Netherlands. Both
methods have been tested in the dataset with good results in tracking
moving objects.
|
- Links: Speaker info, ROBOT-15
250 Seminar 12-11-2015 - Speaker: Angel Santamaria ()
- Title: High-Frequency MAV State Estimation Using Low-Cost Inertial and Optical Flow Measurement Units
- Abstract:
|
This paper develops a simple and low-cost method for 3D, high-rate vehicle state estimation, specially designed
for free-flying Micro Aerial Vehicles (MAVs). We fuse observations from inertial measurement units and the recently
appeared low-cost optical flow smart cameras. These smart cameras integrate a sonar altimeter, a triaxial gyrometer
and an optical flow sensor, and directly provide metric ego-motion information in the form of body velocities and
altitude. Compared to state-of-the-art visual-inertial odometry methods, we are able to drastically reduce the
computational load in the main processor unit, and obtain an accurate estimation of the vehicle state at a high
update rate of 100Hz. We thus extend the current use of these smart cameras from hovering purposes to odometry
estimation. In order to propose a simple algorithmic solution, we investigate the performances of two Kalman
filters, in the extended and error-state flavors, alongside a large number of algorithm variations, using
simulations and real experiments with precise ground-truth. We observe that the marginal performance gain
attained with these algorithm improvements does not pay for the effort of implementing them. We conclude
that a classical EKF in its simplest form is sufficient for providing motion estimates that coherently
exploit the available measurements.
|
- Links: Speaker info, IROS-15
249 Seminar 15-10-2015 - Speaker: David Martinez ()
- Title: Safe Robot Execution in Model-Based Reinforcement Learning
- Abstract:
|
Task learning in robotics requires repeatedly executing the same actions in different states to learn the
model of the task. However, in real-world domains, there are usually sequences of actions that, if executed,
may produce unrecoverable errors (e.g. breaking an object). Robots should avoid repeating such errors when
learning, and thus explore the state space in a more intelligent way. This requires identifying dangerous
action effects to avoid including such actions in the generated plans, while at the same time enforcing
that the learned models are complete enough for the planner not to fall into dead-ends.
We thus propose a new learning method that allows a robot to reason about dead-ends and their causes.
Some such causes may be dangerous action effects (i.e., leading to unrecoverable errors if the action
were executed in the given state) so that the method allows the robot to skip the exploration of risky
actions and guarantees the safety of planned actions. If a plan might lead to a dead-end (e.g., one that
includes a dangerous action effect), the robot tries to find an alternative safe plan and, if not found,
it actively asks a teacher whether the risky action should be executed.
This method permits learning safe policies as well as minimizing unrecoverable errors during the learning
process. Experimental validation of the approach is provided in two different scenarios: a robotic task
and a simulated problem from the international planning competition. Our approach greatly increases success
ratios in problems where previous approaches had high probabilities of failing.
|
- Links: Speaker info, IROS-15
248 Seminar 17-7-2015 (at the FME conference room)- Speaker: Antonio Torralba ()
- Title: Large Scale Visual Scene Recognition
- Abstract:
|
Human visual scene understanding is remarkable: with only a brief glance
at an image, an abundance of information is available - spatial structure,
scene category and the identity of main objects in the scene. In this talk
I will describe some of our work on scene and object recognition, and in
building models of human vision (including eye movements and image memory).
|
- Links: Speaker info
247 Seminar 16-7-2015 - Speaker: Oscar Martinez Mozos ()
- Title: Monitoring Technologies to Support Robotic Assistants
- Abstract:
|
During the first minutes of this talk I will give a brief introduction about my past
research on robotic perception. Afterwards, my current work on different technologies
to monitor the activity of people and their mental state. In particular, I will
concentrate on stress monitoring, and activities for daily life (ADL) monitoring.
The final goal is to use these technologies to support a service robot that will
assists people during their everyday activities, with the final aim of improving
their quality of life.
|
- Links: Speaker info
246 Seminar 6-7-2015 (at 10:00 at FME meeting room)- Speaker: Vincent Lepetit ()
- Title: Hands Deep in Deep Learning for Hand Pose Estimation
- Abstract:
|
We introduce and evaluate several architectures for Convolutional Neural Networks to
predict the 3D joint locations of a hand given a depth map. We first show that a prior
on the 3D pose can be easily introduced and significantly improves the accuracy and
reliability of the predictions. We also show how to use context efficiently to deal
with ambiguities between fingers. These two contributions allow us to significantly
outperform the state-of-the-art on several challenging benchmarks, both in terms of
accuracy and computation times. A recent arXiv paper independently shows that our
approach outperforms the other ones on the existing benchmarks.
|
- Links: Speaker info
245 Seminar 11-6-2015- Speaker: Ricardo Tellez ()
- Title: The Construct: robotics simulations in the cloud
- Abstract:
|
Robotics tools are the key to good research work. One of those basic tools is the
simulator. Current robotics simulators they are very expensive, or they lack a lot
of simulation features or they are slow to be run.
The Construct comes as a solution to all this problems. It is a web page from where
to execute any robotic simulator in the market. The user can choose among a list of
simulators to run. Simulators are executed in the cloud, freeing the user computer
from high load. Simulations can be executed using any device or machine with a
WebGL browser (Linux, Windows, Mac, iOS, Android...). Old versions of simulations
are forever available. You can share your simulation and work at the same time
with your colleagues. And many more features.
|
- Links: Speaker info, The Construct Sim
244 Seminar 27-5-2015 (Wednesday)- Speaker: Federico Thomas ()
- Title: Approaching Dual Quaternions from Matrix Algebra
- Abstract:
|
Dual quaternions give a neat and succinct way
to encapsulate both translations and rotations into a unified
representation that can easily be concatenated and interpolated.
Unfortunately, the combination of quaternions and dual numbers
seem quite abstract and somewhat arbitrary when approached
for the first time. Actually, the use of quaternions or dual numbers
separately are already seen as a break in mainstream robot
kinematics, which is based on homogeneous transformations. In this talk
we will see how dual quaternions arise in a natural way when
approximating 3D homogeneous transformations by 4D rotation
matrices. This results in a seamless presentation of rigid-body
transformations based on matrices and dual quaternions which
permits building intuition about the use of quaternions and their
generalizations.
|
- Links: Speaker info
Seminar 14-5-2015- 243 Speaker: Michael Villamizar ()
- Title: Modeling Robot's World with Minimal Effort
- Abstract:
|
We propose an efficient human-to-robot interaction approach to efficiently
model the appearance of all relevant objects in robot's environment. Given
an input video stream recorded while the robot is navigating, the user just
needs to annotate a very small number of frames to build specific classifiers
for each of the objects of interest. At the core of the method lie several
random ferns classifiers, that share the same features and are updated online.
The resulting methodology is fast (runs at 8 fps), versatile (it can be applied
to unconstrained scenarios), scalable (real experiments show we can model up to
30 different object classes), and minimizes the amount of human intervention by
leveraging the uncertainty measures associated to each classifier. We thoroughly
validate the approach on synthetic data and on real sequences acquired with a
mobile platform in outdoor and challenging scenarios containing a multitude of
different objects. We show that the human can, with minimal effort, provide the
robot with a detailed model of the objects in the scene.
|
- Links: Speaker info
- 242 Speaker: Michael Villamizar ()
- Title: Efficient Monocular Pose Estimation for Complex 3D Models
- Abstract:
|
We propose a robust and efficient method to estimate the pose of a camera with respect
to complex 3D textured models of the environment that can potentially contain more than
100; 000 points. To tackle this problem we follow a top down approach where we combine
high-level deep network classifiers with low level geometric approaches to come up with
a solution that is fast, robust and accurate. Given an input image, we initially use a
pre-trained deep network to compute a rough estimation of the camera pose. This initial
estimate, constrains the number of 3D model points that can be seen from the camera
viewpoint. We then establish 3D-to-2D correspondences between these potentially visible
points of the model and the 2D detected image features. Accurate pose estimation is
finally obtained from the 2D-to-3D correspondences using a novel PnP algorithm that
rejects outliers without the need to use a RANSAC strategy, and which is between 10
and 100 times faster than other methods that use it. Two real experiments dealing
with very large and complex 3D models demonstrate the effectiveness of the approach.
|
- Links: Speaker info
241 Seminar 8-5-2015- Speaker: Gerhard Neumann ()
- Title: Learning Modular Control Policies in Robotics
- Abstract:
|
One big aim in robotics is to learn modular control policies that can synthesize complex
behaviour out of simpler elemental movements, often called movement primitives. Such
structure of the control policy comes with the promise of simplifying complex learning
problems into simpler tasks and alleviates learning of new, but similar tasks. In order
to learn modular control policies efficiently, the underlying learning algorithm as well
as the movement primitive representation have to fulfil several requirements. We need
simple mechanisms to adapt the primitive to new situations and we need to learn how to
sequence primitives and combine primitives simultaneously such that we can synthesize
complex behaviour out of a compact set of movement primitives.
In this talk I will introduce our recent work on learning such a modular control
policy with information theoretic policy search. Information-theoretic policy search
uses an information-theoretic bound to determine the step-size of the policy update. It
exhibits several beneficial properties, such as a smooth and stable learning process and a
fast learning speed. We extended information-theoretic policy search methods such that we
can efficiently generalize elemental movements to new situations, learn to select between several
elemental movements and learn how to sequence elemental movements. Furthermore, I will present a
new probabilistic movement primitive (ProMP) representation that is particularly well suited for
such a modular control approach. ProMPs allow us to use new probabilistic operators that provide
a principled way of generalization and co-activation of movement primitives.
|
- Links: Speaker info
240 Seminar 27-4-2015 (at 11:00)- Speaker: Jan Funke ()
- Title: Neuron Reconstruction from Anisotropic Electron Microscopy Volumes
- Abstract:
|
In this talk, I will give an overview about our current state of the art in
neuron reconstruction, i.e., the problem of the automatic extraction of the
wiring diagram of a nervous system from electron microscopy volumes. Our methods
focus on anisotropic volumes with high x- and y-resolution but low z-resolution,
as obtained by serial section electron microscopy imaging procedures. Due to
this anisotropy, we treat the data as a stack of 2D images, rather then a
continuous 3D volume. Consequently, in order to reconstruct the 3D shape of each
neuron, our model solves a multi-object tracking problem, where the objects are
neuron slices, i.e., 2D cross-sections of neurons. For that, we consider
multiple slice candidates in each image, which we link with possible assignment
across images. We show how a globally cost-minimal segmentation of neuron slices
and assignments between images can be found jointly and efficiently. Finally, I
show how random sampling in a CRF can be used for candidate generation, and how
the structured learning framework helps to find optimal parameters for our
model.
|
- Links: Speaker info
Seminar 23-4-2015- 239 Speaker: Joan Vallvé ()
- Title: Active Pose SLAM with RRT*
- Abstract:
|
We propose a novel method for robotic exploration that evaluates paths
that minimize both the joint path and map entropy per meter traveled.
The method uses Pose SLAM to update the path estimate, and grows an RRT*
tree to generate the set of candidate paths. This action selection mechanism
contrasts with previous appoaches in which the action set was built
heuristically from a sparse set of candidate actions. The technique
favorably compares agains the classical frontier-based exploration
and other Active Pose SLAM methods in simulations in a common publicly
available dataset.
|
- Links: Speaker info
- 238 Speaker: Adrià Colomé ()
- Title: A Friction-Model-Based Framework for Reinforcement Learning of Robotic Tasks in Non-Rigid Environments
- Abstract:
|
Learning motion tasks in a real environment with deformable objects requires not
only a Reinforcement Learning (RL) algorithm, but also a good motion characterization,
a preferably compliant robot controller, and an agent giving feedback for the rewards/costs
in the RL algorithm. In this paper, we unify all these parts in a simple but effective way
to properly learn safety-critical robotic tasks such as wrapping a scarf around the neck
(so far, of a mannequin). We found that a suitable compliant controller ought to have a good
Inverse Dynamic Model (IDM) of the robot. However, most approaches to build such a model do
not consider the possibility of having hystheresis of the friction, which is the case for
robots such as the Barrett WAM. For this reason, in order to improve the available IDM, we
derived an analytical model of friction in the seven robot joints, whose parameters can be
automatically tuned for each particular robot. This permits compliantly tracking diverse
trajectories in the whole workspace. By using such friction-aware controller, Dynamic
Movement Primitives (DMP) as motion characterization and visual/force feedback within
the RL algorithm, experimental results demonstrate that the robot is consistently capable
of learning tasks that could not be learned otherwise.
|
- Links: Speaker info
237 Seminar 16-4-2015- Speaker: Stuart Maggs ()
- Title: Minibuilders small robot 3D printing large scale objects, automating the construction site
- Abstract:
|
The seminar will focus on current and future applications for robotics within the construction industry.
Specifically the concept of Minibuilders, small robots 3D printing structures much larger than themselves.
Swapping one large robot for a number of smaller, agile specialised robots, working in coordination towards
a single structural outcome.
|
- Links: Minibuilders info
236 Seminar 9-4-2015- Speaker: Ricardo Tellez ()
- Title: Robots that build concepts I: building the concept of space
- Abstract:
|
How do we create concepts? How can we design a robot that builds concepts? In this seminar
I will show you a theoretical framework in which a naive robot, without any previous knowledge
of the environment or of its body, can autonomously build concepts about the world or about itself.
Specifically I will show how the robot can build the concept of space just by taking into account
its sensorimotor flow, indicating the full dependence that perception has on action.
|
- Links: Speaker info
235 Seminar 16-3-2015- Speaker: Keith Clark ()
- Title: Programming Robotic Agents: A Multi-tasking Teleo-Reactive Approach
- Abstract:
|
This talk will present a multi-threaded/multi-tasking message communicating robotic agent
architecture in which the concurrently executing tasks are programmed in TeleoR, a major
extension of Nilsson’s Teleo-Reactive Procedures (TR) language for robotic agents. TeleoR
programmed tasks are robust and opportunistic, redoing or skipping actions as appropriate.
This makes them well suited to robot/robot or human/robot co-operative tasks.
TeleoR’s most important extension of TR is the concept and use of task atomic procedures
to control the deadlock and starvation free sharing of multiple robotic resources by an
agent’s concurrent tasks, as illustrated in this video
|
- Links: Speaker info
234 Seminar 12-3-2015- Speaker: Arturo Ribes ()
- Title: Active Learning of Object and Body Models with Time Constraints on a Humanoid Robot
- Abstract:
|
We propose an active learning approach applied to a music performance imitation scenario. The humanoid robot iCub
listens to a human performance and then incrementally learns to use a virtual musical instrument in order to imitate
the given sequence. This is achieved by first learning a model of the instrument, needed to locate where the required sounds are heard
in a virtual keyboard layed out in a tactile interface. Then, a model of its body affordances is also learnt,
which serves to establish the likelihood of success of the actions needed to imitate the sequence of sounds and
to correct the errors made by the underlying kinematic controller. It also uses self-evaluation stages to provide
feedback to the human instructor, which can be used to guide its learning process.
|
- Links: Speaker info
233 Seminar 2-3-2015- Speaker: Gerard Pons-Moll ()
- Title: Modeling Humans in Motion: Capture and Animation
- Abstract:
- Links: Speaker info
232 Seminar 12-2-2015- Speaker: Adrià Colomé ()
- Title: Reinforcement Learning of Robotic Tasks: Policy Search with Movement Primitives
- Abstract:
|
Policy Search is nowadays the most used Reinforcement Learning approach to learn robot motion tasks.
In this seminar, I will explain the process of learning a robotic task: why Policy search is used,
how are trajectories represented, executed and learned, and some of the directions the research
community is taking in this field.
|
- Links: Speaker info
231 Seminar 29-1-2015- Speaker: Hilario Tomé ()
- Title: Whole body control using Robust & Online hierarchical quadratic optimization
- Abstract:
|
Recently, several formulations have been proposed to add inequality constraints to multi objective
prioritized optimization problems. How to solve this problems with only equality constraints is a
well known topic in robotics. Inequality constraints behave as equalities when they reach their
bounds, so ideally we shouldn’t bother about them before we reach them. How we take them into
account and what to do when they are reached affects drastically the computational effort of
solving the problem. We present and derive an efficient way to deal with these problems using
an off the shelf Quadratic Programming solver and choosing an appropriate solving strategy.
We finally apply the proposed method to do whole body control in real time on a humanoid
robot with 44 dof using a hierarchy of objectives.
|
- Links: PAL Robotics, Video
230 Seminar 18-12-2014- Speaker: Vicenç Gomez ()
- Title: Towards Kullback-Leibler control for robotics
- Abstract:
|
Kullback-Leibler control problems define a general class of stochastic
optimal control problems for which the controls and the cost function are
restricted in a way that makes the Hamilton-Jacobi-Bellman equation linear
and therefore more efficiently solvable. However, direct applicability of this
theory to real robotics problems is limited because of two main reasons: first,
current theory can only be applied to learn open-loop controllers and second,
current computational methods do not scale well to high dimensional systems.
I will briefly describe the theory behind this class of problems and present
some recent results towards its application to real robotics systems.
|
- Links: Speaker info
229 Seminar 4-12-2014- Speaker: Adriàn Peñate ()
- Title: LETHA: Learning from High Quality Inputs for 3D Pose Estimation in Low Quality Images
- Abstract:
|
We introduce LETHA (Learning on Easy data, Test on Hard), a new learning paradigm consisting of building
strong priors from high quality training data, and combining them with discriminative machine learning to deal with
low-quality test data. Our main contribution is an implementation of that concept for pose estimation.
We first automatically build a 3D model of the object of interest from high-definition images, and devise
from it a pose-indexed feature extraction scheme. We then train a single classifier to process these feature
vectors. Given a low quality test image, we visit many hypothetical poses, extract features consistently and
evaluate the response of the classifier. Since this process uses locations recorded during learning, it does
not require matching points anymore. We use a boosting procedure to train this classifier common to all poses,
which is able to deal with missing features, due in this context to self-occlusion. Our results demonstrate
that the method combines the strengths of global image representations, discriminative even for very tiny images,
and the robustness to occlusions of approaches based on local feature point descriptors.
|
- Links: Speaker info
228 Seminar 20-11-2014- Speaker: Enric Celaya ()
- Title: Online EM with Weight-Based Forgetting
- Abstract:
|
The expectation-maximization (EM) algorithm is an iterative procedure to
estimate the parameters of a finite mixture so as to maximize the likelihood
of a set of unlabelled data. Its primary use is classification of data, but
it can also been used for other tasks such as probability density estimation,
regression, or function approximation. The EM algorithm is a batch algorithm,
so that all data must be processed at each iteration. When the dataset to be
processed is large, or when data are supplied as a stream, the EM algorithm
becomes impractical and incremental or online versions of the algorithm are
more convenient. Sato & Ishii (2000) developed an online EM algorithm in which
a time-dependent discount factor was introduced to forget the influence of
old estimations obtained with earlier, inaccurate estimators. In their approach,
forgetting is uniformly applied to the estimators of each mixture component at
each iteration, irrespective of the weight attributed to each component for the
current data sample. This causes an excessive forgetting in the less frequently
sampled components that may cause instabilities in the estimations. To address
this problem we propose a modification of the algorithm that involves a weight-dependent
forgetting, specific for each mixture component, by which old estimations are only
forgotten in accordance with the actual weight used to replace them with new data.
A comparison of the weight-independent versus the weight-dependent approach shows that
this last improves the accuracy of the estimation and exhibits a much greater stability.
|
- Links: Speaker info
227 Seminar 13-11-2014- Speaker: Angel Santamaria ()
- Title: Task Priority Control for Aerial Manipulation
- Abstract:
|
This talk presents a task oriented control strategy for aerial vehicles equipped with a manipulator.
A camera is attached to the end-effector of the manipulator to perform a primary task consisting
on visual servoing towards a desired target. Over-actuation of the whole quadrotor-arm system is
exploited to achieve secondary velocity tasks. One subtask is proposed to horizontally stabilize
the platform during flight by aligning the arm center of gravity with the quadrotor gravitational
vector. The arm singularities and manipulability are addressed by another subtask that leads the
arm to a preferable configuration, and also takes into account the arm joint limits. The
performance of the whole visual servo and secondary tasks control scheme is shown in a Robot
Operating System (ROS) implementation.
|
- Links: Speaker info
226 Seminar 23-10-2014- Speaker: Aleix Rull ()
- Title: On Generalized Dual Euler Angles
- Abstract:
|
This paper first explores the generalization of Euler angles to the case in which the
rotation axes are not necessarily members of an orthonormal triad, and presents a concise
solution to their computation that relies on the calculation of standard Euler angles.
Then, this generalization is taken one step further by introducing translations, that is,
by defining generalized Euler angles about screw axes using a variation of the principle of
transference that avoids the use of dual numbers. As an example, the obtained formulation is
applied to solve the inverse kinematics of a 3C manipulator.
|
- Links: Speaker info
225 Seminar 22-7-2014- Speaker: Federico Sukno ()
- Title: 3D Facial Geometry and Dynamics for Behavior Analysis
- Abstract:
|
In this talk, after a short introduction of my trajectory, I will briefly discuss the wide applications of facial behavior
analysis and the current trend to encode emotion information. Then, I will concentrate on my most recent contributions to
automatic facial landmarking in 3D, whose main building block an algorithm integrating combinatorial search on the responses
from feature detectors, with statistical inference. A key assumption of our approach is that some landmarks might not be
accurately identified by the feature detectors. While many approaches try to fight this by computing more features or
analyzing more detections, we found that it is more accurate to omit the information from unreliable landmarks and infer
their location statistically. As a byproduct, our approach is inherently tolerant to occlusions.
The core algorithm is complemented by a framework to objectively compare the suitability of different local descriptors
for the localization of specific landmarks, in terms of their expected accuracy and working range (i.e. the neighborhood
size where they aremost useful around the given target). Differently from precision-recall curves, these measures are landmark
specific and show that, in general, no descriptor is suitable to tackle all landmarks typically targeted with
optimal accuracy. Thus, combinations of descriptors are required, which we tackled by designing an extension to 3D Shape
Contexts based on asymmetry patterns, whose most salient characteristic is its efficiency to generate pools of descriptors
at relatively low computational cost.
An interesting outcome of our research on landmark localization was to highlight the lack of consistency of the manual
annotations currently available for public databases that are widely used. In contrast to traditional measures of accuracy,
such as inter- and intra-observer variability, we base our analysis on the consistency of annotations by comparing the
inter-landmark distances of replicates (i.e. different scans from the same individual). We objectively showed that manual
annotations currently available are suboptimal and an that appropriately trained algorithm, as the one described in this
talk, can objectively outperform them for a majority of landmarks in terms of repeatability.
|
- Links: Speaker info
224 Seminar 17-7-2014- Speaker: Pablo García-Amorena ()
- Title: Testing Convolutional Neural Networks against hand-designing local features for Image Segmentation
- Abstract:
|
In the Computer Vision Laboratory (CVLAB), at École Polytechnique Fédérale de Lausanne (EPFL), most of its algorithms for
Biomedical Image Segmentation depend on hand-designing local features for classification purposes. A competing approach is
to rely on Convolutional Neural Networks, an algorithm in which the CVLAB has little experience but would like to test for
comparison purposes. The goal of the project is to understand what they can do but also what they can't do and what
hand-designing features are still good for. To achieve it, the project starts with a phase of documentation, in order to
get familiarized with Neural Networks in general and Convolutional Neural Networks in particular. The second part consists
of a series of experiments with a Convolutional Neural Networks algorithm, so as to analyze its performance with different
types of data and several improvements coming from the most recent state-of-the-art techniques. Finally, the project
summarizes all the experiments done with the CLVAB biomedical data and makes a comparison with its hand-designing local
features, in order to find out about their goodness and utility.
|
- Links: Lab info
223 Seminar 9-7-2014- Speaker: Jeremy Wyatt ()
- Title: Robots That Know What They Know
- Abstract:
|
One of the long standing challenges at the interface between
AI and Robotics is enabling robots to behave robustly in the
face of incompleteness and uncertainty. In this talk I will
describe the overall approach I have taken to this problem
over the past ten years. Key to the approach is to model the
world in ways that enables robust extrapolation to new cases,
and to plan action sequences taking into account their
information effects. I will structure the talk into two halves.
In the first half I will give an overview, composed of three
short parts: i) epistemic and assumptive planning in mobile
robots for object search; ii) decision theoretic models of gaze
control; ii) grasping novel objects under uncertainty.
Half way through I'll let the audience vote for which part
you want me to cover in more detail in the second half of the
talk.
|
- Links: Speaker info
222 Seminar 17-6-2014- Speaker: Carlos Rosales ()
- Title: Active Gathering of Friction Coefficient (dynamic) and Inertial Values from Objects
- Abstract:
|
Properties extracted from objects include shape, color, weight, texture, coefficient of
friction, inertial values, degrees of freedom, among many others. The challenge in extracting
them is present at hardware and software levels, particularly in designing robotic systems
capable of effectuating desired exploratory strategies, of acquiring sufficient data to estimate
the property, and having a robust and useful representation of it. The predominant properties
used in robotic applications are shape and color due to the extensive use of cameras and the
large computer vision field. However, others such as the friction coefficient and inertial values
are relevant, for instance, for object grasping and manipulation and object recognition as
additional channels of information. These two properties are hard to estimate using vision
only, and contact-based procedures are advised.
We present two ongoing works to actively gather these two mechanical-related properties.
The first one deals with the object shape and the friction coefficient extraction. The data
comes from an RGB-D sensor and an intrinsic tactile sensor mounted on a 7 d.o.f. arm as the
exploratory probe, and it is fed into a Gaussian Process as a single probabilistic representation.
The exploratory strategy exploits the shape model to generate paths over the surface, which are
followed by the probe to measure the friction coefficient. The second work tackles the gathering
of the inertial values and its application to in-hand object pose estimation. The inertial values
are leveraged from rigid body dynamics by grasping the object with a hand equipped with intrinsic
tactile sensors at the fingertips and mounted on a 7 d.o.f. arm. The weight and principal values
of inertia are used as a feature vector for recognition, and as a result of its computation,
provided a database that associate shape and inertial values, it is also possible to estimate
the in-hand object pose.
|
- Links: Speaker info
Seminar 22-5-2014- 221 Speaker: Joan Vallvé ()
- Title: Dense Entropy Decrease Estimation for Mobile Robot Exploration
- Abstract:
|
We propose a method for the computation of entropy decrease in C-space. These
estimates are then used to evaluate candidate exploratory trajectories in the
context of autonomous mobile robot mapping. The method evaluates both map and
path entropy reduction and uses such estimates to compute trajectories that
maximize coverage whilst minimizing localization uncertainty, hence reducing map
error. Very efficient kernel convolution mechanisms are used to evaluate entropy
reduction at each sensor ray, and for each possible robot position and orientation,
taking frontiers and obstacles into account. In contrast to most other exploration
methods that evaluate entropy reduction at a small number of discrete robot
configurations, we do it densely for the entire C-space. The computation of such
dense entropy reduction maps opens the window to new exploratory strategies. In this
paper we present two such strategies. In the first one we drive exploration through a
gradient descent on the entropy decrease field. The second strategy chooses maximal
entropy reduction configurations as candidate exploration goals, and plans paths to
them using RRT*. Both methods use PoseSLAM as their estimation backbone, and are
tested and compared with classical frontier-based exploration in simulations using
common publicly available datasets.
|
- Links: Speaker info, ICRA-14.
- 220 Speaker: Adrian Amor ()
- Title: On-Board Real-Time Pose Estimation for UAVs Using Deformable Visual Contour Registration
- Abstract:
|
We present a real time algorithm for estimating the pose of non-planar objects on which
we have placed a visual marker. It is designed to overcome the limitations of small aerial
robots, such as slow CPUs, low image resolution and geometric distortions produced by wide
angle lenses or viewpoint changes. The method initially registers the shape of a known marker
to the contours extracted in an image. For this purpose, and in contrast to state-of-the art,
we do not seek to match textured patches or points of interest. Instead, we optimize a
geometric alignment cost computed directly from raw polygonal representations of the observed
regions using very simple and efficient clipping algorithms. Further speed is achieved by
performing the optimization in the polygon representation space, avoiding the need of 2D
image processing operations. Deformation modes are easily included in the optimization scheme,
allowing an accurate registration of different markers attached to curved surfaces using a single
deformable prototype. Once this initial registration is solved, the object pose is retrieved
using a standard PnP approach.
|
- Links: Speaker info, ICRA-14.
Seminar 15-5-2014- 219 Speaker: Farzad Husain ()
- Title: Realtime Tracking and Grasping of a Moving Object from Range Video
- Abstract:
|
In this paper we present an automated system that is able to track and
grasp a moving object within the workspace of a manipulator using range
images acquired with a Microsoft Kinect sensor. Realtime tracking is
achieved by a geometric particle filter on the affine group. Based on
the tracked output, the pose of a 7-DoF WAM robotic arm is continuously
updated using dynamic motor primitives until a distance measure between
the tracked object and the gripper mounted on the arm is below a threshold.
Then, it closes its three fingers and grasps the object. The tracker works
in real-time and is robust to noise and partial occlusions. Using only the
depth data makes our tracker independent of texture which is one of the key
design goals in our approach. An experimental evaluation is provided along with
a comparison of the proposed tracker with state-of-the-art approaches,
including the OpenNI-tracker. The developed system is integrated with ROS
and made available as part of IRI's ROS stack.
|
- Links: Speaker info, ICRA-14
- 218 Speaker: Gonzalo Ferrer ()
- Title: Behavior Estimation for a Complete Framework for Human Motion Prediction in Crowded Environments
- Abstract:
|
In the present work, we propose and validate a complete probabilistic framework
for human motion prediction in urban or social environments. Additionally, we
formulate a powerful and useful tool: the human motion behavior estimator. Three
different basic behaviors have been detected: Aware, Balanced and Unaware. Our
approach is based on the Social Force Model (SFM) and the intentionality prediction
BHMIP. The main contribution of the present work is to make use of the behavior
estimator for formulating a reliable prediction framework of human trajectories
under the influence of dynamic crowds, robots, and in general any moving obstacle.
Accordingly, we have demonstrated the great performance of our long-term prediction
algorithm, in real scenarios, comparing to other prediction methods.
|
- Links: Speaker info, ICRA-14
- 217 Speaker: David Martinez ()
- Title: Active Learning of Manipulation Sequences
- Abstract:
|
We describe a system allowing a robot to learn goal-directed manipulation
sequences such as steps of an assembly task. Learning is based on a free mix
of exploration and instruction by an external teacher, and may be active in
the sense that the system tests actions to maximize learning progress and
asks the teacher if needed. The main component is a symbolic planning engine
that operates on learned rules, defined by actions and their pre- and postconditions.
Learned by model-based reinforcement learning, rules are immediately available for
planning. Thus, there are no distinct learning and application phases. We show how
dynamic plans, replanned after every action if necessary, can be used for automatic
execution of manipulation sequences, for monitoring of observed manipulation sequences,
or a mix of the two, all while extending and refining the rule base on the fly.
Quantitative results indicate fast convergence using few training examples, and highly
effective teacher intervention at early stages of learning.
|
- Links: Speaker info, ICRA-14.
216 Seminar 8-5-2014- Speaker: Sergi Foix ()
- Title: Coding leaf exploratory tasks under 3D occupancy-based models
- Abstract:
|
In this talk I will present some recent advances on my research in active
viewpoint planning for gathering data from an unexplored free-form and
non-rigid 3D complex scenario. The aim of this research is to provide a
general task-oriented approach based on information-gain maximization that
easily deals with such a problem. In particular for this talk, I will show
the advances on how to encode viewpoint planning in 3D occupancy models with
the purpose of identifying available probing points in leaves. In overall terms,
the approach consists of repetitively ranking a given set of possible
viewpoints, based on their task-related gains, and then move to the best-ranked
vantage point until the exploratory task termination criterion is achieved.
|
- Links: Speaker info
215 Seminar 20-3-2014 (Cancelled by the speaker)- Speaker: Babette Dellen ()
- Title: Not available
- Abstract:
- Links: Speaker info
214 Seminar 6-3-2014- Speaker: Andreu Corominas ()
- Title: Inertial Measurent Units and their Application to Mobile Robot Localization
- Abstract:
|
In this talk we will first review which data provides an Inertial Measurement Unit (IMU),
and how it is processed to be used in localization problems, focusing on aspects
such as gravity cancellation and bias effects. Afterwards, we will present the
work carried out in the context of the PipeGuard
FP7 European project.
In this later case IMU and encoder measurements were used to localize a sewer pipe
inspection vehicle, following an iterative minimization over a sliding window of
platform states. Experimental results will be shown, pointing out the strongest
points of IMU devices, but analysing why they can't be alone in a localization
application.
|
- Links: Speaker info, Paper
213 Seminar 13-2-2014- Speaker: Jean Marc Montanier ()
- Title: A proposition for the design and control of swarm of robots
- Abstract:
|
Advanced mobile robots today provide for the achievement of a variety of complex tasks,
such as warehouse management (Kiva company), space exploration (NASA missions) or car manufacturing
(industrial robots). The Spirit and Opportunity robots sent by NASA to Mars are such robots, evaluated
at a staggering $625 million. Although an extreme case, with respect to cost, advanced mobile robots
may be said to be, not only expensive, but also limited by a single point of failure i.e. one single robot.
The swarm robotic approach focuses on solving varied and complex tasks through collective
behaviours emerging from the interaction between autonomous simple. Such agents are
therefore simpler in their design and therefore more robust and affordable. Moreover
the use of a large number of robots removes the single point of failure. However experiments
in Swarm robotics are facing hardware and software challenges. On the hardware side,
either the cost of a robot is prohibitive or the robot is limited in its functionalities.
On the software side, it is difficult to design controllers for these robots, as a large
number of interactions has to be taken into account.
I will present in more details the difficulties in designing a robot
for swarm robotic and a solution developed at the CRAB Lab of NTNU. I
will also present the difficulties in designing controller for these robots
and the main avenues of research I'm exploring.
|
- Links: Speaker info
212 Seminar 6-2-2014- Speaker: Eduard Trulls ()
- Title: Bottom-up segmentation for enhanced feature matching
- Abstract:
|
The combination of segmentation and recognition is a long-standing problem
in computer vision. In this talk we will present an approach to exploit segmentation
to construct appearance descriptors (e.g. SIFT) that can deal with occlusion and
background changes, by downplaying measurements coming from pixels that are likely
to belong to a different region than that of the descriptor's center. We will also
present our current work, extending the same approach to object recognition with
deformable part-based models, using SLIC superpixels to 'clean up' the HOG features
and separate foreground and background.
|
- Links: Speaker info
211 Seminar 21-11-2013- Speaker: Norihiro Hagita ()
- Place: FME conference room
- Time: 12:00
- Title: Robotics and Robotics Services in Smart Cities
- Abstract:
- Links: Speaker Info
210 Seminar 21-11-2013- Speaker: Viorela Ila ()
- Place: IRI meeting room floor -1
- Time: 11:00
- Title: Blocks Rock! Block Matrix Framework for Nonlinear Least Squares
- Abstract:
|
A large number of robotic, computer vision and computer graphics applications
rely on efficiently solving the associated sparse linear systems. Simultaneous
localization and mapping (SLAM), structure from motion (SfM), non-rigid shape
recovery, and elastodynamic simulations are only few examples in this direction.
In general, these problems are nonlinear and the solution can be approximated by
incrementally solving a series of linearized problems. In some applications, the
size of the system considerably affects the performance, especially when the
sparsity is low. Exploiting the block structure of such problems, we developed
very efficient solutions to manipulate block matrices within iterative nonlinear
solvers. We proposed a scheme which combines the advantages of block-wise schemes
convenient in both, numeric and structural matrix modification and element-wise,
which are efficient in arithmetic operations. SLAM++ is a very efficient implementation
of incremental nonlinear least squares, based on the sparse block matrix scheme. It is
aimed for use in 3D reconstruction and robotics. The implementation was designed with
hardware acceleration in mind. This is very important for large scale problems, which
can efficiently run on wide scale of accelerators, ranging from DSPs and FPGAs to clusters
of GPUs.
|
- Links: Speaker Info
209 Seminar 7-11-2013- Speaker: Josep M. Porta ()
- Title: The Cuik Suite: Motion Analysis of Closed-chain Multibody Systems
- Abstract:
|
Many situations in Robotics require an effective analysis of
the motions of a closed-chain mechanism. Despite appearing
very often in practice (e.g. in parallel manipulators,
reconfigurable robots, or molecular compounds), there is a
lack of general tools to effectively analyze the complex configuration
spaces of such systems. In this talk I will give an overview of
the Cuik Suite, an open-source
toolbox for motion analysis of general closed-chain mechanisms. The package
can determine the motion range of the whole mechanism or of some of its parts,
detect singular configurations leading to control or dexterity issues, or
find collision- and singularity-free paths between given configurations.
The toolbox is the result of several years of research and development
within the Kinematics and Robot Design group
and is available under GPLv3 license.
|
- Links: CuikSuite, Speaker Info
Seminar 24-10-2013- 208 Speaker: Gonzalo Ferrer ()
- Title: Robot Companion: A Social-Force based approach with Human Awareness-Navigation in Crowded Environments
- Abstract:
|
Robots accompanying humans is one of the core capacities every service robot
deployed in urban settings should have. We present a novel robot
companion approach based on the so-called Social Force Model (SFM).
A new model of robot-person interaction is obtained using the SFM which
is suited for our robots Tibi and Dabo. Additionally, we propose an interactive
scheme for robot's human-awareness navigation using the SFM and prediction
information. Moreover, we present a new metric to evaluate the robot
companion performance based on vital spaces and comfortableness criteria.
Also, a multimodal human feedback is proposed to enhance the behavior of
the system. The validation of the model is accomplished throughout an
extensive set of simulations and real-life experiments.
|
- 207 Speaker: Patrick Grosch ()
- Title: A Bilinear Formulation for the Motion Planning of Non-Holonomic Parallel Orienting Platforms
- Abstract:
|
This paper deals with the motion planning problem for parallel
orienting platforms with one non-holonomic joint and two
prismatic actuators which can maneuver to reach any three-degree-of-freedom
pose of the moving platform. Since any system with two inputs
and up to four generalized coordinates can always be transformed
into chained form, this path planning problem can be solved using
well-established procedures. Nevertheless, the use of these procedures
requires a good understanding of Lie algebraic methods whose technicalities
have proven a challenge to many practitioners who are not familiar with them.
As an alternative, we show how by (a) properly locating the actuators,
and (b) representing the platform orientation using Euler parameters,
the studied path planning problem admits a closed-form solution whose
derivation requires no other tools than ordinary linear algebra.
|
- Links: IROS-13
206 Seminar 22-10-2013- Speaker: Horst Bunke ()
- Title: A quadratic time approximation of graph edit distance
- Abstract:
|
Graph edit distance is a powerful and flexible method for error-tolerant
graph matching. Yet often it can only be calculated for small graphs due to
its exponential time complexity. In this talk we propose a quadratic time
approximation of graph edit distance based on the Hausdorff distance. In a
series of experiments we analyze the performance of the proposed Hausdorff
edit distance in the context of graph classification and compare it with a
cubic time algorithm based on the assignment problem. Overall, the proposed
Hausdorff edit distance shows a promising potential in terms of flexibility,
efficiency, and accuracy.
|
- Links: Speaker Info
205 Seminar 17-10-2013- Speaker: Aleksandar Jevtic ()
- Title: 3D vision as interaction modality for mobile robots
- Abstract:
|
The study of human-robot interaction (HRI) carries numerous challenges related to
the concepts general to HRI and the specific use of robotic systems that interact
with humans in a particular application domain. Mobile robots that operate in a
home setting must be able to continuously track users and attend their calls for
interaction. Recent release of affordable RGB-D sensors allowed development of
new interaction modality that relies on real-time human body segmentation and
can be applied in this domain. The proposed work, performed as a part of the
EU-funded INTRO project, exploits 3D vision as input for intuitive interaction
through person tracking, person following, gesture recognition and robot control.
This seminar will introduce the algorithms and the challenges related to system
integration and practical deployment of a RGB-D sensor on the autonomous mobile robot.
|
- Links: Home page, INTRO project
204 Seminar 10-10-2013- Speaker: Arnau Ramisa ()
- Title: FINDDD: A Fast 3D Descriptor to Characterize Textiles for Robot Manipulation
- Abstract:
|
Most current depth sensors provide 2.5D range
images in which depth values are assigned to a rectangular
2D array. In this paper we take advantage of this structured
information to build an efficient shape descriptor which is about
two orders of magnitude faster than competing approaches,
while showing similar performance in several tasks involving
deformable object recognition. Given a 2D patch surrounding
a point and its associated depth values, we build the descriptor
for that point, based on the cumulative distances between their
normals and a discrete set of normal directions. This processing
is made very efficient using integral images, even allowing
to compute descriptors for every range image pixel in a few
seconds. The discriminative power of our descriptor, dubbed
FINDDD, is evaluated in three different scenarios: recognition
of specific cloth wrinkles, instance recognition from geometry
alone, and detection of reliable and informed grasping points.
|
- Links: IROS-13
203 Seminar 26-6-2013 (11h)- Speaker: Pol Monsó ()
- Title: Supervoxel-Based Segmentation of Mitochondria in EM Image Stacks with Learned Shape Features
- Abstract:
|
Immense amounts of high resolution data are now
routinely produced thanks to recent advances in EM imaging.
While a strong demand for automated analysis now exists, it
is stifled by the lack of robust automatic 3D segmentation
techniques. State-of-the-art Computer Vision algorithms designed
to operate on natural 2D images tend to perform poorly when
applied to EM image stacks for a number of reasons. The sheer
size of a typical EM image stack renders many segmentation
schemes intractable. Most approaches rely on local statistics that
easily become confused when confronted with the noise and
textures found within EM image stacks. The assumption that
strong image gradients always correspond to object boundaries is
violated by cluttered membranes belonging to numerous objects.
In this work, we propose an automated graph partitioning
scheme that addresses these issues. It reduces the computational
complexity by operating on supervoxels instead of voxels, incor-
porates global shape features capable of describing the 3D shape
of the target objects, and learns to recognize the distinctive ap-
pearance of true boundaries. Our experiments demonstrate that,
when applied to segment mitochondria from neural tissue, our
approach closely matches the performance of human annotators
and outperforms a state-of-the-art 3D segmentation technique.
|
- Links: Lab
202 Seminar 20-6-2013- Speaker: Montserrat Manubens ()
- Title: Motion planning for 6-D manipulation with aerial towed-cable systems
- Abstract:
|
Performing aerial 6-dimensional manipulation using
flying robots is a challenging problem, to which only little
work has been devoted. This paper proposes a motion planning
approach for the reliable 6-dimensional quasi-static manipulation
with an aerial towed-cable system. The novelty of this approach
lies in the use of a cost-based motion-planning algorithm together
with some results deriving from the static analysis of cable-driven
manipulators. Based on the so-called wrench-feasibility
constraints applied to the cable tensions, as well as thrust
constraints applied to the flying robots, we formally characterize
the set of feasible configurations of the system. Besides, the
expression of these constraints leads to a criterion to evaluate
the quality of a configuration. This allows us to define a cost
function over the configuration space, which we exploit to
compute good-quality paths using the T-RRT algorithm. As
part of our approach, we also propose an aerial towed-cable
system that we name the FlyCrane. It consists of a platform
attached to three flying robots using six fixed-length cables. We
validate the proposed approach on two simulated 6-D quasi-static
manipulation problems involving such a system, and show the
benefit of taking the cost function into account for such motion
planning tasks.
|
- Links: Speaker Info,
RSS-13
201 Seminar 18-6-2013- Speaker: Juan Solà ()
- Title: Rich and high dynamic pose estimation for naturally unstable robots (visual-inertial sensor fusion)
- Abstract:
|
This presentation is devoted to the real-time estimation of the pose (position and
orientation in 3D space) of high-dynamic and naturally unstable robots such as aerial drones, humanoid
robots, or ground robots running at very high speeds on rough terrain. The key point is the inclusion
of inertial measurements fused with vision, leading to a quite elegant replica of what constitutes the
oculo-vestibular system of superior animals, key for their sense and control of motion and equilibrium.
The system draws on monocular, EKF-based simultaneous localization and mapping (SLAM). It was initially
motivated by the need of real-time, rich and accurate pose estimates to be used within the control loop
of the humanoid robot HRP2 at LAAS-CNRS, although it is equally useful in any device requiring fast pose
updates with information of the gravity direction, crucial in naturally unstable robots of different
nature. In particular, the outcome of the visual-inertial fusion algorithm is a vector of position,
orientation, velocity, angular velocity, acceleration, gravity vector, and sensor biases, which is updated
at frequencies ranging from 100Hz up to several kHz depending only on the IMU data-rate. These estimates
are both globally and locally consistent thanks to the fusion of the complementary characteristics of the
visual and inertial sensors used.
|
- Links: Speaker Info
200 Seminar 13-6-2013- Speaker: Edgar Simo ()
- Title: A Joint Model for 2D and 3D Pose Estimation from a Single Image
- Abstract:
|
We introduce a novel approach to automatically recover 3D human pose
from a single image. Most previous work follows a pipelined approach:
initially, a set of 2D features such as edges, joints or silhouettes are
detected in the image, and then these observations are used to infer the
3D pose. Solving these two problems separately may lead to erroneous 3D
poses when the feature detector has performed poorly. In this paper, we
address this issue by jointly solving both the 2D detection and the 3D
inference problems. For this purpose, we propose a Bayesian framework
that integrates a generative model based on latent variables and
discriminative 2D part detectors based on HOGs, and perform inference
using evolutionary algorithms. Real experimentation demonstrates
competitive results, and the ability of our methodology to provide
accurate 2D and 3D pose estimations even when the 2D detectors are
inaccurate.
|
- Links: Speaker Info, CVPR-13
199 Seminar 30-5-2013- Speaker: Alex Goldhoorn ()
- Title: Methods to play Hide-and-Seek as a Mobile Robot
- Abstract:
|
Hide-and-seek is a good game to study Human Robot Interaction; there are cognitive
as well as engineering approaches to play the game as a robot. We have focused on the
latter using different models and strategies to play as a seeker. Tests have been done
extensively in simulations, and partly in real world experiments with Dabo. We introduce
a new fast heuristic method for the seeker and a more complex method that uses MOMDP
(Mixed Observability Markov Decision Processes) models to learn a good policy to be
applied by the seeker. Even though MOMDPs reduce the computational cost of POMDPs
(Partially Observable MDPs), they still have a high computational complexity which is
exponential with the number of states. For the hide-and-seek game, the number of states
is directly related to the number of grid cells. As an alternative to off-line MOMDP
policy computation with the complete grid fine resolution, we have devised a two-level
MOMDP, where the policy is computed on-line at the top level with a reduced number of
states independent of the grid size.
|
- Links: Speaker Info
198 Seminar 21-5-2013- Speaker: Marcela Riccillo ()
- Title: Innovations in Humanoid Robots 2013
- Abstract:
|
Currently Robotics reached vehicular traffic through autonomous vehicles circulating
several streets in the world. This advance was greatly influenced by the
2007 USA DARPA Grand Challenge where robot car teams participated from all
world. Now, there are a new 2013-2014 Grand Challenge, but this time the leap
will be on the Humanoid Robots. In this talk we will know about robotic trends
and the principal players of the Robotics in the world through this big competition
that could change the scope of the humanoids as we know.
|
- Links: Speaker Info
197 Seminar 2-5-2013- Speaker: Angel Santamaria ()
- Title: Uncalibrated Image-Based Visual Servoing
- Abstract:
|
This paper develops a new method for uncalibrated image-based visual servoing.
In contrast to traditional image-based visual servo, the proposed solution does
not require a known value of camera focal length for the computation of the image
Jacobian. Instead, it is estimated at run time from the observation of the tracked
target. The technique is shown to outperform classical visual servoing schemes in
situations with noisy calibration parameters and for unexpected changes in the
camera zoom. The method's performance is demonstrated both in simulation experiments
and in a ROS implementation of a quadrotor servoing task. The developed solution is
tightly integrated with ROS and is made available as part of the IRI ROS stack.
|
- Links: Speaker Info, ICRA-13
196 Seminar 25-4-2013- Speaker: Adrià Colomé ()
- Title: External Force Estimation During Compliant Robot Manipulation
- Abstract:
|
This paper presents a method to estimate external forces exerted on a manipulator during motion,
avoiding the use of a sensor. The method is based on task-oriented dynamics model learning
and a robust disturbance state observer. The combination of both leads to an efficient torque
observer that can be incorporated to any control scheme. The use of a learning-based approach
avoids the need of analytical models of joints' friction or Coriolis dynamics effects.
|
- Links: Speaker Info, ICRA-13
195 Seminar 18-4-2013- Speaker: Udo Frese ()
- Title: [+|-manifolds and their use in estimation algorithms
- Abstract:
|
A [+]-manifold, just as a manifold, is a subspace S of R^s which can have a
globally very complicated structure but locally behaves
like R^n. An example is 3-D orientation. This structure is encapsulated in an operator [+]:S*R^n->S
that allows to apply a local vector valued change to an element
and an inverse operator [-]:S*S-->R^n. WIth these operators most
estimation algorithms can work on [+]-manifolds,
mostly by replacing + with [+] and - with [-].
The talk gives overview and intuition, why [+]-manifolds are a useful
concept, how they are axiomatized and how they are used in estimation
algorithms such as least-squares or UKF.
|
- Links: More Info, Speaker Info
194 Seminar 11-4-2013- Speaker: Babette Dellen ()
- Title: Learning object-action relations from observation with semantic event chains
- Abstract:
|
Recognizing manipulations performed by a human and the
transfer and execution of this by a robot is a difficult problem. We
address this by introducing a novel representation of the relations
between objects at decisive time points during a manipulation. Thereby,
we encode the essential changes in a visual scenery in a condensed way
such that a robot can recognize and learn a manipulation without prior
object knowledge. To achieve this we continuously track image segments
in the video and construct a dynamic graph sequence.
Topological transitions of those graphs occur whenever a spatial
relation between some segments has changed in a discontinuous way and
these moments are stored in a transition matrix called the (SEC). We
demonstrate that these time points are highly descriptive for
distinguishing different manipulations. Employing simple sub-string
search algorithms, semantic event chains can be compared and
type-similar manipulations can be recognized with high confidence. As
the approach is generic, statistical learning can be used to find the
archetypal SEC of a given manipulation class. The performance of the
algorithm is demonstrated on a set of real videos showing hands
manipulating various objects and performing different actions. In
experiments with a robotic arm, we show that the SEC can be learned by
observing human manipulations, transferred to a new scenario, and then
reproduced by the machine.
|
- Links: Speaker Info
193 Seminar 7-3-2013- Speaker: Montserrat Manubens ()
- Title: Navigating the wrench-feasible C-space of cable-driven hexapods
- Abstract:
|
Motion paths of cable-driven hexapods must carefully be planned to ensure that the
lengths and tensions of all cables remain within acceptable limits, for a given wrench applied to the
platform. The cables cannot go slack –to keep the control of the platform– nor excessively tight –to
prevent cable breakage– even in the presence of bounded perturbations of the wrench. This talk
presents a path planning method that accommodates such constraints simultaneously. Given two
configurations of the platform, the method attempts to connect them through a path that, at
any point, allows the cables to counteract any wrench lying inside a predefined uncertainty
region. The resulting C-space is placed in correspondence with a smooth manifold, which allows
defining a continuation strategy to search this space systematically from one configuration,
until the second configuration is found, or path non-existence is proved by exhaustion of the
search. The approach is illustrated on the NIST Robocrane hexapod, but it remains applicable
to general cable-driven hexapods, either to navigate their full six-dimensional C-space,
or any of its slices.
|
- Links: Speaker Info
192 Seminar 21-2-2013- Speaker: Horst Bunke ()
- Title: Bridging the Gap Between Structural and Statistical Pattern Recognition
- Abstract:
|
The discipline of pattern recognition is traditionally divided into the statistical
and the structural approach. Statistical pattern recognition is characterized by representing objects by
means of feature vectors, while the structural approach uses symbolic data structures, such as strings,
trees, and graphs. In the current talk we focus on graphs for object representation. When comparing graph
representations with feature vectors, one notices an increased flexibility and representational power
provided by graphs. On the other hand, the domain of graphs lacks mathematical operations needed to build
pattern recognition and machine learning algorithms and consequently, there is a shortage of suitable tools
for graph classification, clustering, and related tasks.
In this talk, we review some advances in the field of graph-based pattern recognition that aim at making
algorithmic tools originally developed in statistical pattern recognition available for graphs. We will
focus on graph embedding and discuss relations with graph kernels. As a matter of fact, graph embedding
provides us with an elegant and systematic way to make the complete arsenal of statistical pattern recognition
tools available for graphs. The talk will also address computational complexity problems that arise with graph
representations, discuss how they may possibly be overcome, and give an application example.
|
- Links: Speaker Info
191 Seminar 31-1-2013- Speaker: Adrián Peñate ()
- Title: 3D pose estimation in low quality images
- Abstract:
|
Obtaining object pose in low quality images cannot be achieved using the
classical point features approach. To solve this cases we propose a method
that learns on high quality controlled data the inner structure of the object.
We will show that a strong understanding of the object makes possible recognition
of it when bad or partial data is provided. To understand this inner structure
we will use 3D data and high resolution images annotated with the pose of the
object. Our main contributions are a new procedure to perform 3D training and
a new boosting technique that is able to handle 3D visibility of the features.
We compare against state-of-the-art methods for recognition in low quality data,
we outperform them substantially.
|
- Links: Speaker Info
190 Seminar 16-1-2013- Speaker: Nicola Rebagliati ()
- Title: Some Recent Results On Graph Matching Problems
- Abstract:
|
In this talk I will present, at a high level, some recent advances on
two fundamental graph matching problems: the graph edit distance and the
computation of a median graph. In the first part, I will present a new
method to compute the Graph Edit Distance between two attributed graphs
which is based on Dominant Sets, a notion of cluster recently introduced.
In the second part, I will show new theoretical results which link the problem
of finding the Median Graph of a set of graphs to the Common Labelling problem.
These are joint works with Albert Solé Ribalta, Francesc Serratosa and
Marcello Pelillo.
|
- Links: Speaker Info
189 Seminar 20-12-2012- Speaker: Jordi Sánchez ()
- Title: Social skills on Humanoid robot NAO
- Abstract:
|
Humanoids expected to collaborate with people should be able to
interact with them in the most natural way. This involves significant
perceptual, communication, and motor processes, operating in a coordinated
fashion. Consider a social gathering scenario where a humanoid is expected
to possess certain social skills. It should be able to explore a populated
space, to localize people and to determine their status. Humans appear to
solve these tasks routinely by integrating the often complementary
information provided by multi sensory data processing.
In the talk will be presented some applications to achieve these goals.
A sceneflow and a temporal version of a stereo seed growing algorithm are
developed to provide to the robot information about the environment.
In order to give to the robot some commands, an action recognition method
based on the Bag-of-Words framework is implemented using a descriptor based
on the 3D data and auditory information. Finally to make the interaction
more real we would like that the robot identifies when a person is speaking
and direct the head towards this person. This is achieved also using visual
and auditory data fused by a Gaussian mixture model.
|
- Links: Speaker Info
188 Seminar 13-12-2012- Speaker: Iván Huerta ()
- Title: Unsupervised Multi-Appearance Object Learning from Motion Cues
- Abstract:
|
Current object class detectors learn models from generic images taken from
different viewpoints and lighting conditions but using ground truth data.
A lot of effort is usually devoted to manual labelling, since the goal is to
generate a robust object model able to work for different appearances and
aspects. Unfortunately, manual labelling is expensive, specially in long image
sequences. Also, object detectors trained for general scenes usually exhibit
poor performance under uncontrolled conditions. Finally, there are sequences
where we are interested to detect particular objects for which there is not
specific data, i.e. pre-trained detectors. In such cases, motion segmentation
is still the most practical solution.
In this paper, we propose an alternative solution based on a combination
of motion segmentation and recent advances on weakly-supervised object
detection. We propose a framework based on latent SVMs that, given a noisy
initialization based on motion cues, is able to learn the correct position, the
scale, and the appearance of all moving ob jects in the scene. We test our new
approach on challenging sequences, and show that our detector outperforms
motion segmentation as well as general object detectors.
|
- Links: Speaker Info
187 Seminar 22-11-2012- Speaker: Gonzalo Ferrer ()
- Title: Human Motion Prediction in Urban Environments
- Abstract:
|
The deployment of service robots in urban settings is an open issue for the
robotics community. Tackling the problem by only relying on a robust navigation is not enough,
although this topic has grown enormously in the few past years. Thus, the understanding of
human motion in urban environments is of extreme importance in order to adapt service
robots to typical human environments and not in the contrary. Human motion prediction
in indoor and outdoor scenarios is a key issue towards an intelligent robot navigation
and human robot interaction in general. In thiss seminar, I will present a new
human motion intentionality indicator, denominated Bayesian Human Motion
Intentionality Prediction (BHMIP), which is a geometric-based long-term
predictor. The BHMP is compared with other long-time prediction state of
the art methods using two well known databases. Additionally, experiments
in a real scenario are carried out including a set of volunteers walking in
the presence of a mobile two-wheeled robot, to validate the overall
performance of the BHMIP.
|
- Links: Speaker Info
186 Seminar 8-11-2012- Speaker: Michael Villamizar ()
- Title: Online Human-Assisted Learning Using Random Ferns
- Abstract:
|
We present an Online Random Ferns (ORFs) classifier that progressively
learns and builds enhanced models of object appearances. During the learning process, we
allow the human intervention to assist the classifier and discard false positive training
samples. The amount of human intervention is minimized and integrated within the online
learning, such that in a few seconds, complex object appearances can be learned. After the
assisted learning stage, the classifier is able to detect the object under severe changing
conditions. The system runs at a few frames per second, and has been validated for face and
object detection tasks on a mobile robot platform. We show that with minimal human assistance
we are able to build a detector robust to viewpoint changes, partial occlusions, varying
lighting and cluttered backgrounds.
|
- Links: Speaker Info, ICPR-12
185 Seminar 18-10-2012- Speaker: Sergi Foix ()
- Title: Information-gain view planning for free-form object reconstruction with a 3D ToF camera
- Abstract:
|
Active view planning for gathering data from an unexplored 3D
complex scenario is a hard and still open problem in the computer
vision community. In this paper, we present a general task-oriented
approach based on an information-gain maximization that easily deals
with such a problem. Our approach consists of ranking a given set of
possible actions, based on their task-related gains, and then executing
the best-ranked action to move the required sensor.
An example of how our approach behaves is demonstrated by applying it
over 3D raw data for real-time volume modelling of complex-shaped
objects. Our setting includes a calibrated 3D time-of-flight (ToF)
camera mounted on a 7 degrees of freedom (DoF) robotic arm. Noise in
the sensor data acquisition, which is too often ignored, is here
explicitly taken into account by computing an uncertainty matrix
for each point, and refining this matrix each time the point is
seen again. Results show that, by always choosing the most
informative view, a complete model of a 3D free-form object is
acquired and also that our method achieves a good compromise between
speed and precision.
|
- Links: Speaker Info
Seminar 4-10-2012- 184 Speaker: Rafael Valencia ()
- Title: Active Pose SLAM
- Abstract:
|
We present an active exploration strategy that complements Pose SLAM and optimal
navigation in Pose SLAM.
The method evaluates the utility of exploratory and place revisiting sequences and chooses the one that
minimizes overall map and path entropies. The technique considers trajectories of similar path length
taking marginal pose uncertainties into account.
An advantage of the proposed strategy with respect to competing approaches is that to evaluate information
gain over the map, only a very coarse prior map estimate needs to be computed. Its coarseness is independent
and does not jeopardize the Pose SLAM estimate. Moreover, a replanning scheme is devised to detect
significant localization improvement during path execution. The approach is tested in simulations in a
common publicly available dataset comparing favorably against frontier based exploration.
|
- Links: Speaker Info, IROS-12
- 183 Speaker: Adrià Colomé ()
- Title: Redundant Inverse Kinematics: Experimental Comparative Review and Two Enhancements
- Abstract:
|
Motivated by the need of a robust and practical Inverse Kinematics (IK) algorithm
for the WAM robot arm, we reviewed the most used closed-loop methods for redundant robots, analysing
their main points of concern: convergence, numerical error, singularity handling, joint limit
avoidance, and the capability of reaching secondary goals. As a result of the experimental
comparison, we propose two enhancements. The first is to filter the singular values of the
Jacobian matrix before calculating its pseudoinverse in order to obtain a more numerically
robust result. The second is to combine a continuous task priority strategy with selective
damping to generate smoother trajectories. Experimentation on the WAM robot arm shows that
these two enhancements yield an IK algorithm that outperforms the reviewed state-of-the-art
ones, in terms of the good compromise it achieves between time step length, Jacobian
conditioning, multiple task performance, and computational time, thus constituting a very
solid option in practice. This proposal is general and applicable to other redundant robots.
|
- Links: Speaker Info, IROS-12
182 Seminar 27-9-2012- Speaker: Dimiter Zlatanov ()
- Title: Singularities of mechanisms and robots
- Abstract:
|
In certain configurations, usually referred to as singularities, the kinematic and
static properties of mechanisms change dramatically. As these changes are
often detrimental, the study of such singular configurations has been a
major topic in the robotics literature. However, most of the work done
concentrates on specific mechanisms and is motivated by the desire to
avoid narrowly defined types of configurations. Even among specialists
in robot kinetostatics, there is slight knowledge and often misunderstanding
about what singularities are in general and what their effects can be.
The talk will try to provide a simple but rigorous introduction to the topic.
Particular attention will be given to lesser known types of singularity,
exhibited by some parallel robots and other mechanisms with closed-loop
kinematic chains.
|
- Links: Speaker Lab
181 Seminar 21-9-2012- Speaker: Adnan Sljoka ()
- Title: Counting for rigidity and flexibility - algorithms and applications to protein flexibility and linkage decompositions
- Abstract:
|
In combinatorial characterization of rigidity one can simply count the vertices
and edges (constraints) in a graph and its subgraphs to determine the rigidity
and flexibility of a corresponding framework. The first complete combinatorial
generalization for (generic) bar and joint frameworks in dimension 2 was
confirmed by Laman in 1970. The 6|V|- 6 counting condition for 3-dimensional
body-hinge and molecular structures, and a fast pebble game algorithm which
tracks this count in the multigraph, have led to the development of the program
FIRST, for rapid predictions of the rigidity/flexibility in
proteins. In this talk we will show how our various extensions of the pebble
game algorithm can be used to predict hinge motions in proteins, as well as
some preliminary predictions for elusive allosteric communication - where
binding on one portion of protein changes the shape or binding at a distance
active site of the protein. We will demonstrate our rigidity-based allosteric
communication on the important class of signalling proteins known as GPCRs. Time
permitting, we will briefly discuss how our rigidity techniques and algorithms
can be used to decompose a linkage into Assur graphs.
|
- Links: Speaker Info
180 Seminar 26-6-2012 (at 16:00)- Speaker: Albert Cardona ()
- Title: Neural circuit reconstruction from electron microscopy image volumes
- Abstract:
|
Neural circuits consist of neuronal arbors that synapse onto each other.
The pattern of connectivity specifies the function that a circuit implements.
Electron microscopy is currently the only imaging modality capable of
unambiguously resolving the smallest circuit elements, namely individual
synapses and terminal dendrites. Technological developments in electron
microscopy, driven by the needs of neuroscience--large volumes at
nanometer resolution--make possible the imaging of complete brains of
small animals, and large chunks of mammalian nervous tissue. Even small
animals like the Drosophila larva contain tens of thousands of neurons
and millions of synapses, and therefore manual reconstruction is not
possible. The stumbling block in extracting neural circuits from EM
image volumes is the lack of fast and reliable algorithms for the
reconstruction of neuronal arbors in 3d and the labeling of synaptic
contacts. In this talk, I will show how neurons and synapses look like
in EM image volumes; demonstrate all that goes wrong with current
methods, and outline ideas for the development of algorithms that
imitate humans in their ability to overcome ambiguities originating in
noise and data loss for the successful reconstruction of neural circuits
in desirable time scales.
|
- Links: Speaker Info
179 Seminar 21-6-2012 - Speaker: Oriol Bohigas ()
- Title: Planning Singularity-free Force-feasible Paths on the Stewart Platform
- Abstract:
|
This paper provides a method for computing force-feasible paths on the Stewart platform.
Given two configurations of the platform, the method attempts to connect them through a
path that, at any point, allows the platform to counteract any external wrench lying
inside a predefined six-dimensional region. In particular, the Jacobian matrix of the
manipulator will be full rank along such path, so that the path will not traverse the f
orward singularity locus at any point. The path is computed by first characterizing the
force-feasible C-space of the manipulator as the solution set of a system of equations,
and then using a higher-dimensional continuation technique to explore this set systematically
from one configuration, until the second configuration is found. Examples are included that
demonstrate the performance of the method on illustrative situations.
|
- Links: Speaker Info, ARK-12
178 Seminar 14-6-2012 - Speaker: Nicolás Rojas ()
- Title: Distance-Based Formulations for the Position Analysis of Kinematic Chains
- Time: 11:00
- Abstract:
|
This seminar will be a rehearsal of Nico's PhD defense.
|
- Links: Speaker Info
177 Seminar 7-6-2012 - Speaker: Syed Farzad Husain ()
- Title: Consistent depth video segmentation using adaptive surface models
- Abstract:
|
We present a novel approach for the segmentation of 3-D point clouds
into geometric surfaces using adaptive surface models. The intrinsic
adaptation mechanism allows the segmentation to adapt to changing
depth data, leading to stable, temporally coherent, and traceable
segments. Starting from an initial configuration, the algorithm
converges to a stable segmentation through a novel iterative split-and-merge
procedure. By simply udpating the 3-D point cloud with the upcoming frame
during the movie, the segmentation accommodates to the current data.
This strategy further allows the formation of new segments during the video
and the elimination of segments representing objects that are disappearing. We tested
the method on a large variety of data acquired with different range imaging devices,
including a structured-light sensor and a time-of-flight camera, and successfully
segmented the videos into surfaces segments. We further demonstrate the feasibility
of the approach using quantitative evaluations based on ground-truth data.
|
- Links: Speaker Info
176 Seminar 30-5-2012 - Speaker: Edgar Simo ()
- Title: Kinematic Synthesis of Multi-fingered Robotic Hands for Finite and Infinitesimal Tasks
- Abstract:
|
In this paper we present a novel method of designing multi-fingered
robotic hands using tasks composed of both finite and infinitesimal
motion. The method is based on representing the robotic hands as a
kinematic chain with a tree topology. We represent finite motion using
Clifford algebra and infinitesimal motion using Lie algebra to perform
finite dimensional kinematic synthesis of the multi-fingered mechanism.
This allows tasks to be defined not only by displacements, but also by
the velocity and acceleration at different positions for the design of
robotic hands. The additional information enables an increased local
approximation of the task at critical positions, as well as contact and
curvature specifications. An example task is provided using an
experimental motion capture system and we present the design of a
robotic hand for the task using a hybrid Genetic
Algorithm/Levenberg-Marquadt solver.
|
- Links: Speaker Info,
ARK-12
175 Seminar 29-5-2012 - Speaker: Josep M. Olm ()
- Title: Model-reference adaptive control with minimal controller synthesis
- Abstract:
|
In this talk we will introduce a class of passivity-based MRAC controllers that require
Minimal Controller Synthesis (MCS). This means that, for systems in control canonical
form with unknown (possibly time-varying) parameters and subject to matched,
unmodelled nonlinearities and/or disturbances, the MCS strategy is able to ensure
tracking of the states of a given reference model. We will also comment on the
extensions of the MCS algorithm to discrete-time systems and its effectiveness
in the implementation of MCS controllers for continuous-time plants. The proposal
will be illustrated with numerical and experimental results as well.
|
- Links: Speaker Info
174 Seminar 24-5-2012 - Speaker: Eduard Serradell ()
- Title: Robust Non-Rigid Registration of 2D and 3D Graphs
- Abstract:
|
We present a new approach to matching graphs embedded in R2 or R3. Unlike
earlier methods, our approach does not rely on the similarity of local
appearance features, does not require an initial alignment, can handle
partial matches, and can cope with non-linear deformations and
topological differences.
To handle arbitrary non-linear deformations, we represent them as Gaussian
Processes. In the absence of appearance information, we iteratively
establish correspondences between graph nodes, update the structure
accordingly, and use the current mapping estimate to find the most
likely correspondences that will be used in the next iteration. This makes
the computation tractable.
We demonstrate the effectiveness of our approach first on synthetic
cases and then on angiography data, retinal fundus images, and microscopy
image stacks acquired at very different resolutions.
|
- Links: Speaker Info,
CVPR-12
173 Seminar 15-5-2012 - Speaker: Júlia Borràs ()
- Title: Static analysis of parallel manipulators with compliant joints
- Abstract:
|
Many robotic hands use compliant joints because they provide several advantages
when interacting with objects in unknown environments, but they also modify the
relation between external and internal forces and vary the reachable workspace.
We propose a detailed study of how compliant joints modify the statics of
hands, from the point of view of parallel manipulators. Starting with fully
actuated parallel manipulators, the chosen mathematical framework clarifies
the role of joint compliance and allows to measure the reduction/increase of
torque exerted by the active joints due to the influence of the passive compliant ones.
|
- Links: Speaker Info
172 Seminar 10-5-2012 - Speaker: Oriol Bohigas ()
- Title: A Singularity-free Path Planner for Closed-chain Manipulators
- Abstract:
|
This paper provides an algorithm for computing singularity-free paths on
non-redundant closed-chain manipulators. Given two non-singular
configurations of the manipulator, the method attempts to connect
them through a configuration space path that maintains a minimum
clearance with respect to the singularity locus at all points.
The method is resolution complete, in the sense that it always
returns a path if one exists at a given resolution, or returns
failure otherwise. The path is computed by defining a
new manifold that maintains a one-to-one correspondence with
the singularity-free configuration space of the manipulator,
and then using a higher-dimensional continuation technique
to explore this manifold systematically from one configuration,
until the second configuration is found. Examples are
included that demonstrate the performance of the method on
illustrative situations.
|
- Links: Speaker Info, ICRA-12
Seminar 26-4-2012 - 171 Speaker: Arnau Ramisa ()
- Title: Using Depth and Appearance Features for Informed Robot Grasping of Highly Wrinkled Clothes
- Abstract:
|
Detecting grasping points is a key problem in cloth manipulation. Most current approaches follow a multiple
re-grasp strategy for this purpose, in which clothes are sequentially grasped from different points until
one of them yields to a desired configuration. In this paper, by contrast, we circumvent the need for
multiple re-graspings by building a robust detector that identifies the grasping points, generally in
one single step, even when clothes are highly wrinkled.
In order to handle the large variability a deformed cloth may have, we build a Bag of Features based detector
that combines appearance and 3D geometry features. An image is scanned using a sliding window with a linear
classifier, and the candidate windows are refined using a non-linear SVM and a grasp goodness criterion
to select the best grasping point. We demonstrate our approach detecting collars in deformed polo shirts,
using a Kinect camera. Experimental results show a good performance of the proposed method not only in
identifying the same trained textile object part under severe deformations and occlusions, but also the
corresponding part in other clothes, exhibiting a degree of generalization.
|
- Links: Speaker Info, ICRA-12
- 170 Speaker: Carlos Rosales ()
- Title: On the Synthesis of Feasible and Prehensile Robotic Grasps
- Abstract:
|
This work proposes a solution to the grasp synthesis problem, which consist of
finding the best hand configuration to grasp a given object for a specific
manipulation task while satisfying all the necessary constraints. This problem
had been divided into sequential sub-problems, including contact region
determination, hand inverse kinematics and force distribution, with the
particular constraints of each step tackled independently. This may lead to
unnecessary effort, such as when one of the problems has no solution given the
output of the previous step as input. To overcome this issue, we present a
kinestatic formulation of the grasp synthesis problem that introduces compliance
both at the joints and the contacts. This provides a proper framework to
synthesize a feasible and prehensile grasp by considering simultaneously the
necessary grasping constraints, including contact reachability, object
restraint, and force controllability. As a consequence, a solution of the
proposed model results in a set of hand configurations that allows to execute
the grasp using only a position controller. The approach is illustrated with
experiments on a simple planar hand using two fingers and an anthropomorphic
robotic hand using three fingers.
|
- Links: Speaker Info, ICRA-12
169 Seminar 30-3-2012 - Speaker: Elisa Martinez ()
- Title: Expressive Deformation Profile for Face Recognition
- Abstract:
|
Face recognition has been a productive field of research for many years. Most of
the existing solutions, however, are based on still images and only reach their best
performance when the subjects want to be recognized. As face recognition systems
continue to improve, better performance is demanded in extreme conditions or challenging
situations, especially by the security industry, interested in more reliable biometric
systems. Motion-based face recognition is a young research area which is motivated by
this growing demand and is inspired by psychological studies that highlight the importance
of motion when humans perform facial recognition. The talk will present a novel motion-based
face recognition approach, the Expressive Deformation Profile, on which I've worked in
collaboration with the Computer Vision Lab at the National University of Singapore.
Results will be shown from experiments in a general Facial Expression Database
(Cohn-Kanade) and in a twins' facial expression database to test the extreme challenge
of distinguishing among identical-twins.
|
- Links: Speaker Info
168 Seminar 15-3-2012 - Speaker: Joost van de Weijer ()
- Title: Intrinsic Images for Color Image Understanding
- Abstract:
|
In this talk I will advocate the usage of the dichromatic reflection model for color image understanding.
This model allows us to explain images by means of their intrinsic properties, and it allows us to discard
scene incidental events such as specularities and shadows. The model separates the surface reflectance in
Lambertian reflectance and specular reflectance.
I will apply the model to a variety of computer vision and image processing problems. The main aim of this
talk is to show that when working with RGB values it is often beneficial to think in terms of the dichromatic
reflection model. The model provides the link between variations of RGB values and physical events in the world.
To demonstrate this, I will apply the model to derive photometric invariant differential structure of images.
Next, I will use the model to estimate the illuminant in a scene, allowing for color constancy. The aim of the
talk is to reveal the strength of the dichromatic model in color image understanding. Finally, I will conclude
with several extensions of the model which include modeling multiple illuminants and ambient lighting.
|
- Links: Speaker Info
167 Seminar 1-3-2012 - Speaker: Ruben Martinez-Cantin ()
- Title: The non-convex paradigm for learning and experimental design
- Abstract:
|
Traditionally, the fields of learning and experimental design have
been characterized for relying in convex functions, which allow to
solve high dimensional problems efficiently. However, many scientific
and engineering problems cannot be directly formulated in terms of
convex functions. Classical approaches in learning and decision making
are based on strong assumptions and approximations such as
discretization of the search space or the selection of suboptimal
(local) decisions. In this talk, I'm going to present some recent
improvements in the fields of non-convex optimization, Bayesian
optimization and non-parametric bandits which can be used as an
efficient alternative to the convex/approximate solution. The talk
includes a couple of robotics problems where these techniques have
shown their potential. Finally, I'm going to present a free toolbox
that we have recently developed with all these methods.
|
- Links: Speaker Info
166 Seminar 21-12-2011 - Speaker: Ariadna Quattoni ()
- Title: Spectral Methods for Learning Finite State Transducers with applications
to Sequence Prediction
- Abstract:
|
The problem of modeling paired input-output sequences arises in numerous
application areas such as natural language processing, speech recognition and
biology. One popular tool for modeling paired input-output sequences is to use
Probabilistic Finite-State Transducers (FSTs). Because FSTs induce a latent state
representation they can be very effective in modeling the intrinsic dynamics of
input-output sequences. My recent work has focused on studying how FSTs can be
used to solve real sequence prediction tasks. This involves developing efficient
learning algorithms for inducing FSTs from supervised data.
Most algorithms for FST learning rely on gradient-based or EM optimizations which
can be computationally expensive and suffer from local optima issues. In the first
part of the talk, I will follow a different approach and present a spectral
algorithm for FST learning with strong PAC-style guarantees. At its core, the
algorithm is simple and scalable to large data sets. Our approach follows a both
recent and no-so-recent line of work which is based on using multiplicity
automaton representations of finite state machines. In the second part of the
talk, I will discuss ongoing work on using this algorithm for sequence prediction
problems in natural language processing and highlight possible uses of FST
learning in other application areas.
|
- Links: Speaker Info
165 Seminar 14-12-2011 - Speaker: Adrià Colomé ()
- Title: Inverse Kinematics Algorithms for serial Redundant Manipulators.
- Abstract:
|
The inverse kinematics (IK) of a robot is the mapping that, given a goal position, calculates a set
of joint positions so as to place the robot's end effector in the specified goal. As this is one of
the most relevant computations to move the robot, there has been a lot of work about obtaining a fast
and robust IK algorithm. In this seminar we will explain the difficulties on analytically obtaining
the inverse kinematics of a robot, and we present the most used closed-loop methods, pointing out
their main concerns, numerical error, convergence, capability of reaching secondary goals, and
respecting joint limits. We also present two enhancements of some of the methods exposed. One of them,
by filtering the Jacobian matrix eigenvalues before calculating its pseudoinverse. The other, as a
combination of other existing methods.
|
- Links: Speaker Info
164 Seminar 1-12-2011 - Speaker: Leonel Rozo ()
- Title: Robot learning from demonstration of force-based tasks with multiple solution trajectories
- Abstract:
|
A learning framework with a bidirectional communication channel is proposed, where a
human performs several demonstrations of a task using a haptic device (providing him/her
with force-torque feedback) while a robot captures these executions using only its
force-based perceptive system. Our work departs from the usual approaches to learning
by demonstration in that the robot has to execute the task blindly, relying only on
force-torque perceptions, and, more essential, we address goal-driven manipulation tasks
with multiple solution trajectories, whereas most works tackle tasks that can be learned
by just finding a generalization at the trajectory level. To cope with these multiple-solution
tasks, in our framework demonstrations are represented by means of a Hidden Markov Model (HMM)
and the robot reproduction of the task is performed using a modified version of Gaussian Mixture
Regression that incorporates temporal information (GMRa) through the forward variable of the HMM.
Also, we exploit the haptic device as a teaching and communication tool in a human-robot interaction
context, as an alternative to kinesthetic-based teaching systems. Results show that the robot is able
to learn a container-emptying task relying only on force-based perceptions and to achieve the goal
from several non-trained initial conditions.
|
- Links: Speaker Info
163 Seminar 10-10-2011 - Speaker: Hiroshi Ishiguro ()
- Title: Humanlike information media for bridging people
- Abstract:
|
Not provided by the speaker.
|
- Links: Speaker Info
162 Seminar 29-09-2011 - Speaker: Oscar Martinez Mozos ()
- Title: Robotic perception in indoor environments
- Abstract:
|
Whenever service robots have to interact with humans they need to
perceive the environment in a similar way people do. This talk
presents several works related to robotic perception in indoor
environments. It first introduces the categorization of typical
places found indoors, like for example corridors and offices, using
different types of sensors. In addition, it presents some techniques
to detect other agents and objects such as people or typical pieces
of furniture. Finally, it describes a conceptual representation of
an indoor environment that can be created by a service robot
by integrating the previous approaches.
|
- Links: Speaker Info
161 Seminar 20-9-2011 - Speaker: Léonard Jaillet ()
- Title: EG-RRT: Environment-Guided Random Trees for Kinodynamic Motion Planning with Uncertainty and Obstacles
- Abstract:
|
Existing sampling-based robot motion planning methods are often inefficient at finding trajectories for
kino- dynamic systems, especially in the presence of narrow passages between obstacles and uncertainty
in control and sensing. To address this, we propose EG-RRT, an Environment-Guided variant of RRT designed
for kinodynamic robot systems that combines elements from several prior approaches and may incorporate a
cost model based on the LQG-MP framework to estimate the probability of collision under uncertainty in
control and sensing. We compare the performance of EG-RRT with several prior approaches on challenging
sample problems. Results suggest that EG-RRT offers significant improvements in performance.
|
- Links: Speaker Info, IROS 2011
160 Seminar 28-07-2011 - Speaker: Léonard Jaillet ()
- Title: Path Planning with Loop Closure Constraints using an Atlas-based RRT
- Abstract:
|
In many relevant path planning problems, loop closure constraints reduce the
configuration space to a manifold embedded in the higher-dimensional joint ambient space.
Whereas many progresses have been done to solve path planning problems
in the presence of obstacles, only few work consider loop closure constraints.
In this paper, we present the AtlasRRT algorithm, a planner
specially tailored for such constrained systems that builds on recently
developed tools for higher-dimensional continuation.
These tools provide procedures to define charts that locally
parametrize manifolds and to coordinate them forming an
atlas. AtlasRRT simultaneously builds an atlas
and a Rapidly-Exploring Random Tree (RRT), using the atlas to sample relevant
configurations for the RRT, and the RRT to devise directions of expansion for the atlas.
The advantage of the new planner comes from that samples obtained from the atlas allow a more
efficient extension of the RRT as compared to state of the art approaches where samples are
generated in the joint ambient space.
|
- Links: Speaker Info, ISRR 2011
159 Seminar 21-07-2011 - Speaker: Nicolás Rojas ()
- Title: A Coordinate-Free Approach to Tracing the Coupler Curves of Pin-Jointed Linkages
- Abstract:
|
In general, high-order coupler curves of plane mechanisms cannot be properly traced by standard
predictor-corrector algorithms due to drifting problems and the presence of singularities. Instead
of focusing on finding better algorithms for tracing curves, a simple coordinate-free method that
first traces these curves in a distance space and then maps them onto the mechanism workspace is
proposed. Tracing a coupler curve in the proposed distance space is much simpler because (a) the
equation of this curve in this space can be straightforwardly obtained from a sequence of bilaterations;
and (b) the curve in this space naturally decomposes into branches in which the signs of the oriented areas
of the triangles involved in the aforementioned bilaterations remain constant. A surjective mapping permits
to map the thus traced curves onto the workspace of the mechanism. The advantages of this two-step method
are exemplified by tracing the coupler curves of a double butterfly linkage, curves that can reach order 48.
|
- Links: Speaker Info, IDETC-MECH 2011
158 Seminar 18-07-2011 - Speaker: Reid Simmons ()
- Title: Human-Robot Social Interaction
- Abstract:
|
Dr. Reis Simmons is a professor at de Carnigie Mellon University, his
research interests focus on developing reliable, highly autonomous systems
(especially mobile robots) that operate in rich, uncertain environments.
The goal is to create intelligent systems that can operate autonomously
for long periods of time in unstructured, natural environments. This
necessitates robots that can plan, effectively reason about uncertainty,
diagnose and recover from unanticipated errors, and reason about their
limitations. In particular, he is interested in architectures for autonomy
that combine deliberative and reactive behavior, reliable execution
monitoring and error recovery, multi-robot coordination, probabilistic and
symbolic planning, formal verification of autonomous systems, and
human-robot social interaction.
|
- Links: Speaker Info
157 Seminar 14-07-2011 - Speaker: Reinaldo Bianchi ()
- Title: Accelerating Reinforcement Learning by using heuristic selection of actions
- Abstract:
|
This seminar will present how to make improved action selection for online
policy learning in robotic
scenarios using reinforcement learning (RL) algorithms.
Since finding control policies using any RL algorithm can be very time
consuming, we combine RL
algorithms with heuristic functions for selecting promising actions during
the learning process.
Several methods have been successfully applied for defining the heuristic
function, including defining a heuristics using information from the
learning process, the use of previous domain knowledge in fixed
heuristics and the reuse of previously learned policies, in a Case-Based
Reasoning approach.
Experimental results on robot navigation will show that the use of very
simple heuristic functions
results in significant performance enhancement of the learning rate.
|
- Links: Speaker Info
156 Seminar 13-07-2011 - Speaker: Fabio Ramos ()
- Title: Continuous Occupancy Mapping with Gaussian Processes
- Abstract:
|
Since it was proposed in 1989, occupancy grids have been a very popular technique to
represent the environment. Despite its efficiency, occupancy grids have a number of
drawbacks - it requires an arbitrary discretisation of the space, it makes strong
assumptions of independence between cells, and it does not scale well to 3D, typically
requiring external data structures. In this talk I will introduce a novel methodology to
continuous occupancy maps directly addressing these issues, the Gaussian Process Occupancy
Maps (GPOM). The problem of occupancy mapping is tackled as a classification task where the
robot's environment is classified into regions of occupancy and free space. This is obtained
by employing a modified Gaussian process as a non-parametric Bayesian learning technique to
exploit the fact that real-world environments inherently possess structure. The result is an
anytime algorithm capable of generating accurate representations of large environments
at arbitrary resolutions to suit many applications. I will show how to extend GPOM to account
for the vehicle's uncertainty in position, and efficient strategies to handle 3D representations.
|
- Links: Speaker Info
155 Seminar 7-07-2011 - Speaker: Anaís Garrell ()
- Title: Human-Robot Dialogues in the Scrabble Game
- Abstract:
|
Nowadays, research opens new fields in the development of entertainment
robots, those robots are able to interact with people and share their
recreation time. Following this idea, Dr. Reid Simmons, Professor of the
Robotics Institute at the Carnigie Mellon University (CMU), began a
project in which a robot plays the scrabble game with 1, 2 or 3 people.
Besides, the robot is able to interact with people through dialogue and
facial expressions. In consequence, this seminar will be focused on the
dialogue of the robot to create an engagement with people and start the
game, furthermore, it will be shown how should be the conversation during
the game depending on players' behavior.
|
- Links: Speaker Info
154 Seminar 29-06-2011 (12 hs.)- Speaker: Ricardo Sánchez-Peña ()
- Title: Identificación y Control: Inválidos, falsos y corruptos
- Abstract:
|
Se desarrollarán temas de fondo en el área de la Identificación y Control de sistemas
dinámicos. Se expondrán los fundamentos de la Identificación Robusta y de la
Falsificación de Controladores surgidas a principios y finales de los '90, respectivamente.
Se tratará especialmente el manejo de la información relativa a la determinación
de familias de modelos, la invalidación de los mismos, los niveles de conservadurismo
(u optimismo) y su uso en el control de sistemas físicos. Se ejemplificará con casos
de aplicación en los que intervino el autor.
|
- Links: ITBA
153 Seminar 16-06-2011 - Speaker: Carlos Rosales ()
- Title: Global Optimization of Robotic Grasps
- Abstract:
|
This talk presents a procedure to optimize the quality
of robotic grasps for objects that need to be held and manipulated
in a specific way, characterized by a number of tight
contact constraints. The main difficulties of the
problem include that the set of feasible grasps is
a manifold implicitly defined by a system of non-linear equations,
the high dimension of this manifold, and
the multi-modal nature of typical grasp quality indices,
which make local optimization methods get trapped into local extrema.
The proposed procedure finds a way around these difficulties
by focussing the exploration on a relevant subset of grasps of lower
dimension, which is traced out exhaustively using
higher-dimensional continuation techniques. Using these techniques,
a detailed atlas of the subset is obtained, on which the highest quality
grasp according to any desired criterion can be readily identified.
We will show results on a 3-finger planar hand and on
the Schunk anthropomorphic hand to validate the approach.
|
- Links: Speaker Info, RSS
152 Seminar 6-06-2011 - Speaker: Michael Villamizar ()
- Title: Detection Performance Evaluation of Boosted Random Ferns
- Abstract:
|
We present an experimental evaluation of Boosted Random Ferns in terms of the detection
performance and the training data. We show that adding an iterative bootstrapping phase
during the learning of the object classifier, it increases its detection rates given that
additional positive and negative samples are collected (bootstrapped) for retraining the
boosted classifier. After each bootstrapping iteration, the learning algorithm is concentrated
on computing more discriminative and robust features (Random Ferns), since the bootstrapped
samples extend the training data with more difficult images. The resulting classifier has
been validated in two different object datasets, yielding successful detections rates in
spite of challenging image conditions such as lighting changes, mild occlusions and cluttered
background.
|
- Links: Speaker Info, IBPRIA-11
151 Seminar 01-06-2011 (16:00 hs, IRI's Seminar Room)- Speaker: Romeo Ortega ()
- Title: Some Control Theory Problems in Modern Energy Systems
- Abstract:
|
In this talk we present some recent theoretical developments concerning the following topics related with energy applications:
- A dynamic router for energy management applications.
- Transient stability of power systems revisited.
- A wind speed estimator for windmill systems.
|
- Links: Speaker Info, Supelec
150 Seminar 30-05-2011 - Speaker: Frank Dellaert ()
- Title: The Bayes Tree and Inference in Large-Scale Graphical Models for SLAM and SFM
- Abstract:
|
Simultaneous Localization and Mapping (SLAM) and Structure from Motion (SFM) are important and closely
related problems in robotics and vision. Not surprisingly, there is a large literature describing solutions
to each problem, and more and more connections are established between the two fields. At the same time,
robotics and vision researchers alike are becoming increasingly familiar with the power of graphical
models as a language in which to represent inference problems. In this talk I will show how SLAM and
SFM can be posed in terms of factor graphs, and how inference in them can be explained in a purely
graphical manner via the concept of variable elimination. I will also show that, when applied to
Gaussian problems, the algorithm yields the familiar QR and Cholesky factorization algorithms,
and that this connection with linear algebra leads to strategies for very fast inference in
arbitrary graphs. I will then present the Bayes tree as a novel data structure for representing
the inferred posteriors. The Bayes tree is similar to a junction tree, yet better embodies the
connection with sparse linear algebra. I will conclude by showing some published and preliminary
work that exploits this connection to the fullest.
|
- Links: Speaker Info
149 Seminar 27-05-2011 - Speaker: Oscar Sandoval ()
- Title: Distributed dynamic task allocation, an approach for time dependent tasks
- Abstract:
|
In last years many research work has focused in different areas within
multi-robot systems. One of these areas is multi-robot task allocation,
which involves the distribution of tasks between robots. Despite the
large number of proposals in literature, there are already many open
issues inside multi-robot task allocation, for example task
reallocation.
Task reallocation or dynamic task allocation, implies the capacity of
the system to change previously done assignations (links between robots
and tasks) to get "best" system performance.
In this paper we present a distributed task reallocation approach, that
relies on an energy-based formalization which considers tasks that
change over time. We use simulation to show the performance of this
proposal and to compare with other architectures.
|
- Links: Speaker Info
148 Seminar 12-05-2011 - Speaker: Edgar Simo ()
- Title: Kinematic Model of the Hand using Computer Vision
- Abstract:
|
The project developed uses a single camera to capture images of a moving
human hand. The position and
orientation of the finger nails is estimated throughout time,
using computer vision. A dimensional kinematic synthesis
solver is used in order to calculate the joint axes and the rotations of
around each joint for a task. This allows creating personalized
kinematic models of human hands for use in both prosthesis and
exoskeleton designs.
|
- Links: Speaker Info
Seminar 5-05-2011 - 147 Speaker: Guillem Alenyà ()
- Title: 3D modelling of leaves from color and ToF data for robotized plant measuring
- Abstract:
|
Supervision of long-lasting extensive botanic experiments is a promising robotic application that some recent
technological advances have made feasible. Plant modelling for this application has strong demands, particularly in what
concerns 3D information gathering and speed. This paper shows that Time-of-Flight (ToF) cameras achieve a good
compromise between both demands, providing a suitable complement to color vision. A new method is proposed to segment
plant images into their composite surface patches by combining hierarchical color segmentation with quadratic surface
fitting using ToF depth data. Experimentation shows that the interpolated depth maps derived from the obtained surfaces
fit well the original scenes. Moreover, candidate leaves to be approached by a measuring instrument are ranked, and then
robot-mounted cameras move closer to them to validate their suitability to being sampled. Some ambiguities arising from
leaves overlap or occlusions are cleared up in this way. The work is a proof-of-concept that dense color data combined
with sparse depth as provided by a ToF camera yields a good enough 3D approximation for automated plant measuring at the
high throughput imposed by the application.
|
- Links: Speaker Info, ICRA-11
- 146 Speaker: Rafael Valencia ()
- Title: Path Planning in Belief Space with Pose SLAM
- Abstract:
|
The probabilistic belief networks that result from standard feature-based
simultaneous localization and map building cannot be directly used to plan
trajectories. The reason is that they produce a sparse graph of landmark
estimates and their probabilistic relations, which is of little value to find
collision free paths for navigation. In contrast, we argue in this paper that
Pose SLAM graphs can be directly used as belief roadmaps. We present a method
that devises optimal navigation strategies by searching for the path in the pose
graph with lowest accumulated robot pose uncertainty, independently of the map
reference frame. The method shows improved navigation results when compared to
shortest paths both over synthetic data and real datasets.
|
- Links: Speaker Info, ICRA-11
145 Seminar 04-05-2011 - Speaker: Alicia Arce ()
- Title: On the Exploitation of MPC Formulations for Performance Enhancement of Fuel Cell Systems
- Abstract:
|
In this talk, several control problems for fuel cell systems will be
studied; specifically I will focus on the temperature and air supply
control for stand-alone fuel cell systems and on the power management
for fuel cell hybrid vehicles. For both cases, advanced MPC
formulations (hybrid and explicit formulations) will be proposed to
deal with piece-wise affine models, binary variables and short
sampling times. The advantages of this technology and real-time
implementation feasibility will be discussed with experimental data.
|
- Links: Speaker Info, IDENER
144 Seminar 7-04-2011 - Speaker: Nicolás Rojas ()
- Title: On Baranov Trusses and Modular Kinematic Analysis
- Abstract:
|
Nowadays, the solution of the position analysis problem of a planar linkage almost
invariably implies, as a first step, obtaining a system of equations from the independent
kinematic loops of the mechanism, since general methods for the analysis of any planar
linkage has been developed based on this set of equations in the last 10-15 years. As a
consequence, the use of this approach, the so-called loop closure equations method, has
been so overwhelming that other approaches for deriving constraints of the valid configurations
of a linkage seem to have been banished from literature. However, this standard approach is
beginning to be questioned because even for simple linkages the resulting system of kinematic
equations is so involved that its solution requires the use of complex variable elimination
techniques or special numerical algorithms. In this seminar, the modular kinematic analysis
of planar linkages using Baranov trusses is presented as an alternative to the loop closure
equations method. Basic definitions, advantages, drawbacks and examples of this approach are
discussed.
|
- Links: Speaker Info
143 Seminar 05-04-2011 (17 hs.). IRI's Main Meeting Room - Speaker: Naira Hovakimyan (Illinois University) ()
- Title: L1 Adaptive Control
- Abstract:
|
The history of adaptive control systems dates back to early 50-s, when
the aeronautical community was struggling to advance aircraft speeds to
higher Mach numbers. In November of 1967, X-15 launched on what was
planned to be a routine research flight to evaluate a boost guidance
system, but it went into a spin and eventually broke up at 65,000 feet,
killing the pilot Michael Adams. It was later found that the onboard
adaptive control system was to be blamed for this incident. Exactly
thirty years later, fueled by advances in the theory of nonlinear
control, Air Force successfully flight tested the unmanned unstable
tailless X-36 aircraft with an onboard adaptive flight control system.
This was a landmark achievement that dispelled some of the misgivings
that had arisen from the X-15 crash in 1967. Since then, numerous flight
tests of Joint Direct Attack Munitions (JDAM) weapon retrofitted with
adaptive element have met with great success and have proven the
benefits of the adaptation in the presence of component failures and
aerodynamic uncertainties. However, the major challenge related to
stability/robustness assessment of adaptive systems is still being
resolved based on testing the closed-loop system for all possible
variations of uncertainties in Monte Carlo simulations, the cost of
which increases with the growing complexity of the systems. This talk
will give an overview of the limitations inherent to the conventional
adaptive controllers and will introduce the audience to the L1 adaptive
control theory, the architectures of which have guaranteed robustness in
the presence of fast adaptation. Various applications, including flight
tests of a subscale commercial jet, will be discussed during the
presentation to demonstrate the tools and the concepts. With its key
feature of decoupling adaptation from robustness L1 adaptive control
theory has facilitated new developments in the areas of event-driven
adaptation and networked control systems. A brief overview of initial
results and potential directions will conclude the presentation.
|
- Links: Speaker Info
142 Seminar 31-03-2011 - Speaker: Iván Huerta ()
- Title: Foreground Object Segmentation and Shadow Detection for Video Sequences in Uncontrolled Environments
- Abstract:
|
This talk is mainly divided in two parts. The first one presents a study of motion segmentation problems.
Based on this study, a novel algorithm for mobile-object segmentation from a static background scene is
also presented. This approach is demonstrated robust and accurate under most of the common problems in
motion segmentation. The second one tackles the problem of shadows in depth. Firstly, a bottom-up
approach based on a chromatic shadow detector is presented to deal with umbra shadows. Secondly,
a top-down approach based on a tracking system has been developed in order to enhance the chromatic shadow detection.
In our first contribution, a case analysis of motion segmentation problems is presented by taking into account
the problems associated with different cues, namely colour, edge and intensity. Our second contribution is a
hybrid architecture which handles the main problems in the case analysis, by fusing (i) these three cues and
(ii) a temporal difference algorithm. On the one hand, we enhance the colour and edge models to solve both
global/local illumination changes (shadows and highlights) and camouflage in intensity. In addition, local
information is exploited to cope with camouflage in chroma. On the other hand, the intensity cue is also
applied when colour and edge cues are not available, such as when beyond the dynamic range. Additionally,
temporal difference is included to segment motion when these three cues are not available. Lastly, the
approach is enhanced for allowing ghost detection.
Most segmentation approaches dealing with shadow detection are typically restricted to penumbra shadows.
Therefore, such techniques cannot cope well with umbra shadows.
In the Bottom-up part, the shadow detection approach applies a novel technique based on gradient and colour
models for separating chromatic moving shadows from moving objects. Hereafter, the regions corresponding to
potential shadows are grouped by considering a bluish effect and an edge partitioning. Lastly, (i) temporal
similarities between local gradient structures and (ii) spatial similarities between chrominance angle and
brightness distortions are analysed for all potential shadow regions in order to finally identify umbra shadows.
In the top-down process, after detection of objects and shadows both are tracked using Kalman filters. Firstly,
this implies a data association and a case analysis between the blobs (foreground and shadow) and Kalman filters.
Based on this association, temporal consistency is looked for the association between foregrounds and shadows and
their respective Kalman Filters. From this association several cases are studied, as a result lost chromatic
shadows are correctly detected.
As a result, our approach obtains very accurate and robust motion segmentation in both indoor and outdoor scenarios,
as quantitatively and qualitatively demonstrated in the experimental results, by comparing our approach with most
best-known state-of-the-art approaches.
|
- Links: Speaker Info
141 Seminar 31-03-2011 (10 hs.). IOC's Seminars Room- Speaker: Martin Cech ()
- Title: Practical robust controller design for fractional systems
- Abstract:
The outline for this presentation is as follows: - basic theory of fractional systems in time and frequency domain - using fractional systems for process identification (model set approach) - robustness regions method for PID and fractional PID controller design - advantages and disadvantages of fractional PID controller - realization of simple fractional elements - industrial applications - interactive Java applets More info
|
- Links: Speaker Institution
140 Seminar 28-03-2011 (Cancelled by the speaker)- Speaker: Leonel Rozo ()
- Title: A Robot Learning from Demonstration Framework to Teach Force-based Multi-Trajectory Tasks
- Abstract:
|
Robot learning from demonstration stands out as a promising way to endow robots with learning capabilities
and allow human beings to teach them tasks in a natural way. This talk addresses how a robot can learn a
multi-trajectory task based on its force/torque perceptions while a human teacher demonstrates the task,
and how he/she can be more involved in the learning process by feeling through haptic feedback what the
robot senses during the demonstration phase. Here, a learning framework with a bidirectional communication
channel is proposed, where a human teacher teleoperates a robotic arm using a haptic interface. The teacher
demonstrates a container-emptying task while receiving F/T feedback sensed by a force sensor placed on the
robotic wrist. Teacher demonstrations are analyzed under the Mutual Information criterion for extracting relevant
input variables for the task. Resulting data streams are statistically encoded using a Hidden Markov Model (HMM) and
the execution phase is developed by implementing a modified version of Gaussian Mixture Regression that uses
implicit temporal information from the HMM. Results show how the robot is able to learn a multi-trajectory task
using only force-based perceptions, which can be exploited in further settings where other perception systems
do not provide enough information about a specific task to be learned or scenarios where force-based data provide
a better understanding about what the robot has to learn.
|
- Links: Speaker Info
139 Seminar 3-03-2011 - Speaker: Arnau Ramisa ()
- Title: Combining attributes and Fisher vectors for efficient image retrieval
- Abstract:
|
Attributes have recently shown to give excellent results
for category recognition. In this paper, we demonstrate
their performance in the context of image retrieval. First,
we show that retrieval based on attribute vectors gives results
comparable to the state of the art if retrieving images
of a particular object. Second, we demonstrate that combining
attribute and Fisher vectors improves performance
for retrieval of the same object as well as categories. Third,
we implement an efficient coding technique for compressing
the combined descriptor to very small codes. Experimental
results on the Holidays dataset show that our approach
significantly outperforms the state-of-the-art, even for a
very compact representation of 16 bytes per image. Retrieving
category images is evaluated on a web dataset set
with text annotation for learning representations. We present
a baseline for retrieval based on images only and show the
contribution of attribute features. Furthermore, we show
how the combined image features can supplement text features.
|
- Links: Speaker Info
138 Seminar 02-03-2011, 16 hs. (Sala de Juntas de FME) - Speaker: Dra. Lucia Marucci ()
- Title: Mathematical analysis, modelling and design of synthetic biological circuits
- Abstract:
|
The functioning and development of living organisms is controlled on the molecular level by networks of genes,
proteins, small molecules, and by their mutual interactions. Prediction, control, and understanding of these
systems, named gene regulatory networks, arise mainly from modelling them using iterated computer simulations
and non-linear mathematical analysis. Biotechnological advances in quantitative high-throughput technology,
in combination with the growing inter-disciplinarity between biology with engineering and natural sciences,
have made this challenge achievable thanks to the emerging fields of Systems and Synthetic biology. In the
seminar we will first present an introduction to the mentioned disciplines, and to the mathematical tools
commonly used. Secondly, we will provide, as example, results about the mathematical modelling and
non-linear analysis of IRMA, a novel synthetic network built in the yeast for benchmarking different computational methods.
|
- Links: Info about CRG
137 Seminar 17-02-2011 - Speaker: Diego Pardo ()
- Title: Learning Robot Motor Skills
- Abstract:
|
The types of tasks that a manipulator can complete have been taken one step
further using machine learning (ML) approaches. Tasks where the robot
interacts with very complex dynamics have been used to demonstrate the
benefits of ML in the exploitation of manipulator capacities. This seminar
will review some state-of-the-art techniques in ML for the generation of
robotic motions, including approaches based on learning by demonstration and
reinforcement learning in continuous states and action spaces.
|
- Links: Speaker Info
136 Seminar 01-02-2011 (12 hs. at the IOC Conference Room)- Speaker: Bernat Joseph i Duran ()
- Title: A simple model for sewage networks: an MPC approach
- Abstract:
|
It will be described the modeling and model predictive control of sewage water networks in presence of episodes of heavy rain. The results are based on a new branching algorithm that has been developed and implemented in the last months in Heidelberg University to solve the associated optimization problem.
|
- Links: ACES Group
135 Seminar 27-1-2011- Speaker: Waldir L. Roque ()
- Title: Path Planning with Generalized Voronoi Diagrams
- Abstract:
|
Generalized Voronoi Diagram (GVD) is an important geometrical technique with several
applications in different fields. In this talk it will be discussed an application
of GVD to autonomous robot path planning with a global vision system. The GVD technique
was implemented and some experiments were conducted with Khepera Lab Robots.
|
- Links: Speaker info
134 Seminar 20-1-2011- Speaker: Albert Ambrós ()
- Title: Disseny, Implementació i Calibratge d'una Plataforma de Gough-Stewart
- Abstract:
|
El present projecte és un estudi sobre un aspecte important en el disseny d'un robot paral.lel.
En particular, l'objectiu és desenvolupar i aplicar una metodologia per a trobar les
posicions d'uns punts característics d'una plataforma de Gough-Stewart reconfigurable.
Específicament, els punts a trobar del robot són els punts d'ancoratge de les cadenes
cinemátiques tant a la base com a la plataforma, que fa d'efector final. Un objectiu
secundari és determinar si és factible l'ús de servo motors de mida i cost reduïts per
a la fabricació de robots paral.lels.
Per aconseguir aixó s'ha desenvolupat un métode numéric i s'ha construït un prototipus
sobre el que s'ha provat aquest métode. Degut a la complexitat de definir matemàticament
la naturalesa dels robots paral.lels i al seu elevat nombre d'incògnites, el cálcul
utilitzat és un algorisme iteratiu basat en el métode de Newton.
Els resultats d'aplicar aquesta metodologia són prou positius. No obstant, Les posicions
trobades són tan properes com ho permet la precisió dels seus elements, ja sigui la del sensor com la dels propis motors.
|
- Links:
133 Seminar 16-12-2010- Speaker: Adrian Peñate ()
- Title: Uncalibrated pose estimation from 2D-to-3D correspondences
- Abstract:
|
Se presentará un nuevo método no-iterativo para la obtención de la pose de la cámara y la
distancia focal a partir de correspondencias 2D-3D. El método presentado ha demostrado ser robusto a ruido
y a correspondencias erróneas. Se ha utilizado una aproximación similar a la utilizada en el algoritmo EPnP.
Mostramos que las técnicas de linearización y relinearización utlizadas en el algoritmo EPnP presentan
limitaciones que hemos solventado mediante lo que hemos definido como linearización y relinearización
exhaustiva.
Presentaremos resultados sobre datos reales y sintáticos; a la vez, compararemos con métodos totalmente
calibrados, el caso del EPnP, y con métodos como el DLT que necesitan encontrar la distancia focal.
Estos resultados corroboran que el método presentado es capaz de ofrecer una precisión y robustez
superior a otros métodos no calibrados y comparable a métodos calibrados.
|
- Links: Speaker info
132 Seminar 2-12-2010- Speaker: Léonard Jaillet ()
- Title: Path Planning on Manifolds using Randomized Higher-Dimensional Continuation
- Time: 12:00
- Abstract:
|
Despite the significant advances in path planning methods, problems in highly constrained
spaces are still challenging. In particular, in many situations the configuration space is a
non-parametrizable variety implicitly defined by constraints, which complicates the successful
generalization of sampling-based path planners.
In this paper, we present a new path planning algorithm specially tailored
for highly constrained systems. It builds on recently developed tools for
Higher-dimensional Continuation, which provide numerical procedures
to describe an implicitly defined variety using a set of local charts.
We propose to extend these methods
to obtain an efficient path planner on varieties, handling highly constrained problems.
The advantage of this planner comes from that it directly operates into the
configuration space and not into the higher-dimensional
ambient space, as most of the existing methods do.
|
- Links: Speaker info, WAFR 2010
131 Seminar 2-12-2010 - Speaker: Niliana Carrero ()
- Title: Herramientas interactivas para control en modo de deslizamiento
- Time: 11:00
- Abstract:
|
En este trabajo se presentan herramientas interactivas en 2D y 3D para ilustrar los
conceptos teóricos de control en modo de deslizamiento de sistemas dinámicos lineales
a trozos. El objetivo final es permitir a los alumnos la posibilidad de visualizar
la evolución del sistema y su respuesta en tiempo real, ante los cambios y configuraciones
de toda una serie de parámetros del sistema en estudio. De esta manera, podrán obtener
conocimientos prácticos y avanzar en la comprensión de la respuesta del sistema de manera
cualitativa y cuantitativa. Las herramientas se han desarrollado mediante Sysqueke y
Easy Java Simulations (EJS), que permite una fácil programación y diseño.
|
- Links: ACES Group
130 Seminar 25-11-2010- Speaker: Montserrat Manubens ()
- Title: Cusp points in the parameter space of degenerate 3-RPR planar parallel manipulators
- Abstract:
|
In this seminar we are going to discuss the existence conditions of cuspidal configurations
on some parameters of a special degenerate 3-RPR parallel manipulator. These
configurations will be detected as cusp points, which make possible non-singular
changes of assembly-mode and thus increase the singularity-free workspace.
We will combine algebraic-geometric techniques, such as Gröbner bases, discriminant
varieties and cylindrical algebraic decomposition, in order to obtain a distribution
of the number of cusp points. This distribution will let us analyze a whole family of
degenerate 3-RPR manipulators that depend on one (or some) geometric parameter.
As a direct application of the presented results we obtain a simple method to determine
the values of either the geometric parameters or the leg-rod lengths that make the
manipulator be non-cuspidal.
|
- Links: Speaker info
129 Seminar 11-11-2010- Speaker: Gerard Sanromà ()
- Title: Robust Attributed Graph Matching with the EM Algorithm and the Graduated Assignment
- Abstract:
|
The correspondence problem in computer vision is of basic importance since it arises at
the early stages of many computer vision applications. So, it is of basic importance to develop efficient
methods that are both robust -in the sense of being able to deal with noisy measurements- and, general
-in the sense of having a wide field of application-.
Attempts to solve the correspondence problem are based either on correlation or on feature descriptors.
Since these methods use the local information around the interest points, that may produce erroneous
matches under certain circumstances.
Outlier rejectors such as RANSAC or Graph Transformation are used remove these erroneous matches by
using global geometrical information. Since these outlier rejectors are unable to modify or produce
new correspondences (different from those in the initial tentative-set), this may lead to poor results
in the case of bad initial tentative-sets.
Attributed graph matching methods are optimization techniques that exploit the nodes' attributes
and their structural relations to compute new correspondences.
We present an attributed graph matching approach that uses the geometrical information of the
feature points in an affine-invariant way. It is also able to detect outlying features in both
sides of the assignment, unlike other graph matching methods in the literature.
We evaluate its performance in image matching and shape retrieval experiments.
|
- Links:
128 Seminar 5-11-2010- Speaker: Viorela ila ()
- Title: Methods for Large scale SLAM
- Abstract:
|
This seminar introduces methods for Large scale SLAM developed during my
stay at Georgia Tech. The motivation of this work comes from the fact
that SLAM is a large optimization problem which requires very fast
solvers when the result is used in real robotic applications. I will
introduce two concepts; the Bayes tree and the subgraph preconditioning
conjugate gradients (SPCG) and will conclude with an application to
underwater 3D reconstruction of submerged structures.
The Bayes tree is a novel data structure that provides an algorithmic
foundation enabling a better understanding of existing graphical model
inference algorithms and their connection to sparse matrix factorization
methods. Similar to a clique tree, a Bayes tree encodes a factored probability
density, but unlike the clique tree it is directed and maps more naturally
to the square root information matrix of the SLAM problem. The Bayes tree is
used to obtain a completely novel algorithm for sparse nonlinear incremental
optimization, that combines incremental updates with fluid relinearization of
a reduced set of variables for efficiency. The new algorithm insures fast
convergence to the exact solution.
SPCG is obtained by re-interpreting the method of conjugate gradients in
terms of the graphical model representation of the SLAM problem. The main
idea is to combine the advantages of direct and iterative methods, by identifying
a sub-problem that can be easily solved using direct methods, and solving for the
remaining part using PCG. The easy sub-problems correspond to a spanning tree, a
planar subgraph, or any other substructure that can be efficiently solved. As such,
our approach provides new insights into the performance of state of the art
iterative SLAM methods based on re-parametrized stochastic gradient descent.
|
- Links: Speaker info
127 Seminar 4-11-2010- Speaker: Jerónimo Moré ()
- Title: Control design and development for a FC\SCs-based autonomous hybrid system
- Place: IOC Conference Room (UPC)
- Abstract:
|
The dynamic response of PEM fuel cells has a relatively slow component, mainly due to water and
reactant gases dynamics. To overcome this limitation, FC-supercapacitors (SCs) topologies can
be used in order to manage very fast power variations, presenting in addition high power density, long
lifecycle and good charge/discharge efficiency. In this seminar, a FC\SC-based autonomous hybrid
system for residential applications that is currently under development in the ACESs Fuel Cell
Laboratory is presented. The FC and SCs are connected in parallel, through two separate DC/DC
converters, to a DC bus. Under steady state conditions, the FC must deliver the load power requirement,
while maintaining the SCs voltage regulated to the desired value. Under sudden load variations, the FC
current rate must be limited to assure a safe transition to the new point of operation. During this current
rate limitation mode, the SCs must deliver or absorb the power difference. To this end, a sliding mode
strategy is proposed to satisfy to control objectives. The main one is the robust regulation of the DC
bus voltage, even in the presence of system uncertainties and disturbances, such as load changes and
FC voltage variations. Additionally, a second control objective is attained, namely to guarantee the
adequate level of charge in the SCs, once the FC reaches the new steady state operation point. In this way,
the system can meet the load power demand, even under sudden changes, and it can also satisfy a
power demand higher than the nominal FC power, during short periods. The preliminary results presented,
corresponds to the first stage of a joint project for the design and development of a novel FC\SCs-based
autonomous hybrid system.
|
- Links:
126 Seminar 28-10-2010- Speaker: Andreu Corominas ()
- Title: Efficient Use of 3D Environment Models for Mobile Robot Simulation and Localization
- Abstract:
|
This talk provides a detailed description of a set of algorithms to efficiently manipulate
3D geometric models to compute physical constraints and range observation models, data that
is usually required in real-time mobile robotics or simulation. Our approach uses a standard
file format to describe the environment and processes the model using the openGL library, a
widely-used programming interface for 3D scene manipulation. The talk also presents results
on a test model for benchmarking, and on a model of a real urban environment, where the
algorithms have been effectively used for real-time localization in a large urban setting.
|
- Links: Speaker info, SIMPAR 2010
125 Seminar 18-10-2010- Speaker: Beatriz Marcotegui ()
- Title: Aplicaciones de la morfología matemática a la modelización urbana y a la localización de texto
- Time: 17:00
- Abstract:
|
El Centro de Morfología Matemática (CMM), fundador de la teoría que lleva su nombre, es un
laboratorio de investigación en tratamiento de imagen de la Escuela de Minas de Paris (Mines ParisTech).
Siempre motivado por las aplicaciones industriales, el CMM ha desarrollado herramientas muy eficaces de
tratamiento de imagen como por ejemplo los filtros conexos, que eliminan el ruido de la imagen sin
afectar los contornos de los objetos de interés o la segmentación jerárquica, que combinada con la teoría
de grafos da lugar a algoritmos muy eficientes, tanto en tiempo de cálculo como en calidad de resultados.
El CMM ha participado con éxito en muchos proyectos de investigación en diversos campos (biología, medicina,
multimedia, materiales, ...). Un rápido panorama de los proyectos en curso actualmente será presentado.
Se presentará con detalle los resultados de dos proyectos recientes:
TerraNumerica, en el que hemos desarrollado herramientas de análisis de escenas
urbanas. El trabajo se
centra en el análisis de nubes de puntos de escenas urbanas. El objetivo es extraer información
semántica para una modelización realista. En primer lugar se segmenta la imagen en fachada,
suelo u objeto presente en la escena. A continuación se clasifican los diferentes objetos de la
escena (coche, peaton, farola...). I-towns, en el que hemos puesto a punto un método de localización de texto en
imágenes genéricas,
que permite extraer información semántica de las imágenes para realizar búsquedas de alto nivel.
|
- Links: Speaker info
124 Seminar 14-10-2010- Speaker: Júlia Borràs ()
- Title: Singularity-Invariant Leg Substitutions in Pentapods
- Abstract:
|
A pentapod is usually defined as a 5-degree-of-freedom fully-parallel manipulator with an axial
spindle as moving platform. This kind of manipulators have revealed as an interesting alternative
to serial robots handling axisymmetric tools. Their particular geometry permits that, in one tool
axis, inclination angles of up to 90 degrees are possible thus overcoming the orientation limits
of the classical Stewart platform.
This talk presents a solution to the problem of finding those changes in the location of the
leg attachments of a pentapod that leave its singularity locus invariant. Although the solution
to this problem does not provide a fully characterization of the singularities, it provides a lot
of insight into its nature. It is shown, for example, that there are four different architectures
for a pentapod with a completely different behavior from the point of view of their singularities.
The kinematics of pentaponds with coplanar attachments at the fixed base has previously been studied
as rigid subassemblies of a Stewart platforms. In this talk, we treat the general case in which the
base attachments are arbitrarily located in 3D space.
|
- Links: Speaker info, IROS 2010
123 Seminar 7-10-2010- Speaker: Arnau Dória-Cerezo ()
- Title: Port-Hamiltonian modeling of the Memristor and the higher order elements
- Abstract:
|
Fourty years ago, Prof. L.O. Chua postulated the existence of a fourth element in the circuit theory;
the Memristor.
This element should complete, together with the conventional elements (resistors, inductances and capacitors),
all the relationships between the electrical variables (currents, voltages, fluxes and charges).
But it only existed on paper in the circuit theory... until 2008, when HP researchers found this missing element.
This presentation is a big picture of the state of the art on the Memristor element. It starts with the
definition and
properties of the memristor and some possibles applications are pointed out. The universe of the two-terminal
higher order elements is also introduced, and some of these elements are illustrated through easy examples.
Finally, the port-Hamiltonian formalism is proposed to model these kind of elements.
As conclusions, the open questions that arise during our research are presented.
|
- Links: Speaker info
122 Seminar 13-9-2010- Speaker: Jerry Lin ()
- Title: Development of Autonomous Robots and Robot Theater
- Time: 11:00
- Abstract:
|
This talk will cover the development of several autonomous robots with applications in
education and entertainment and a unique robot theater project in the Advanced Intelligent
Robotics Lab, Taiwan Tech (National Taiwan University of Science and Technology). The autonomous
robots include desktop two-armed companion robots, DOC-1/DOC-2/DOC-3, which interactive functions
in language teaching, board games, etc. The robot theater project developed four large sized
humanoid robots, two two-wheeled, and two bipedal. The two-wheeled robots with two-arms can
balance and move with two wheels, and can perform shows such as real-time portrait and music
note reading-and-singing. The two bipedal robots are androids with two-arms and a human-like
face capable of making facial expressions. They can walk and dance. The four robots together
performed 5 shows to public in a robot theater in 27th December 2008. A new human-robot platform
will be introduced at the end, which can significantly speed up the process and time for asking
robots to operate on objects as a new assignment.
|
- Links: Speaker info
121 Seminar 22-7-2010- Speaker: Dimitris Samaras ()
- Title: Dense Non-rigid Surface Registration Using High-Order Graph Matching
- Abstract:
|
In this talk I will give a brief overview of the activities in the Imaga Analysis Lab in
Stony Brook University. I will focus on our work in 3D Facial Analysis and present our most
recent techniques for non-rigid surface matching. I will describe a high-order graph matching
formulation to address non-rigid surface matching. The singleton terms capture the geometric and
appearance similar- ities (e.g., curvature and texture) while the high-order terms model the
intrinsic embedding energy. The novelty of this paper includes: 1) casting 3D surface registration
into a graph matching problem that combines both geometric and appearance similarities and intrinsic
embedding informa- tion, 2) the first implementation of high-order graph matching algorithm that
solves a non-convex optimization prob- lem, and 3) an efficient two-stage optimization approach to
constrain the search space for dense surface registration. Our method is validated through a series
of experiments demonstrating its accuracy and efficiency, notably in challenging cases of large
and/or non-isometric deformations, or meshes that are partially occluded.
|
- Links: Speaker info
120 Seminar 25-6-2010- Speaker: Arnau Ramisa ()
- Title: Fast and Robust Object Segmentation with the Integral Linear Classifier
- Abstract:
|
We propose an efficient method, built on the popular Bag of Features approach, that obtains robust
multiclass pixellevel
object segmentation of an image in less than 500ms, with results comparable or better than
most state of the art methods.
We introduce the Integral Linear Classifier (ILC),that can readily obtain the classification
score for any image sub-window with only 6 additions and 1 product by fusing the accumulation
and classification steps in a single operation. In order to design a method as efficient as
possible, our building blocks are carefully selected from the quickest in the state of the art.
More precisely, we evaluate the performance of three popular local descriptors, that can be
very efficiently computed using integral images, and two fast quantization methods: the
Hierarchical K-Means, and the Extremely Randomized Forest. Finally, we explore the utility
of adding spatial bins to the Bag of Features histograms and that of cascade classifiers to
improve the obtained segmentation.
Our method is compared to the state of the art in the difficult Graz-02 and
PASCAL 2007 Segmentation Challenge datasets.
|
- Links: Speaker info
Seminar 17-6-2010- 119 Speaker: Nicolás Rojas ()
- Title: A robust forward kinematics analysis of 3-RPR planar platforms
- Abstract:
|
The standard forward kinematics analysis of 3-RPR planar parallel
platforms boils down to computing the roots of a sextic polynomial. There
are many different ways to obtain this polynomial but all of them include
exceptions for which the formulation is not valid. Unfortunately, near
these exceptions the corresponding polynomial exhibits numerical
instabilities. In this paper, we provide a way around this inconvenience
by translating the forward kinematics problem to be solved into an
equivalent problem fully stated in terms of distances. Using constructive
geometric arguments, an alternative sextic -which is not linked to a
particular reference frame- is straightforwardly obtained without the need
of variable eliminations nor tangent-half-angle substitutions. The
presented formulation is valid, without any modification, for any planar
3-RPR parallel platform, including the special architectures and
configurations -which ultimately lead to numerical instabilities- that
cannot be directly handled by previous formulations.
|
- Links: Speaker info, ARK-2010
- 118 Speaker: Oriol Bohigas ()
- Title: A Complete Method for Workspace Boundary Determination
- Abstract:
|
This paper introduces a new method for workspace boundary determination on general
lower-pair multi-body systems. The method uses a branch-and-prune technique to isolate the set
of end effector singularities, and then classifies the points in such set according to whether they
correspond to actual motion impediments in the workspace. The method can deal with open- or
closed-chain systems, and is able to take joint limits into account. Advantages over other methods
of similar applicability include its completeness and a simpler algorithmic structure. Examples are
included that show its performance on benchmark problems documented in the literature.
|
- Links: Speaker info, ARK-2010
117 Seminar 15-6-2010- Speaker: Pedro Lima ()
- Title: Research on Networked Robot Systems at ISR/IST, Lisboa
- Abstract:
|
In this talk I will describe the research activities at the
Intelligent Systems Lab
of the Institute for Systems and Robotics at Instituto Superior Técnico,
Technical University of Lisbon. Most of the talk will concentrate on
research done on networked robot systems, composed of static and mobile
sensors that cooperate to carry out a diversified set of tasks. The
group is particularly interested on discrete event models of robotic
tasks, prone to qualitative (e.g., formal verification) and quantitative
(e.g., plan probability of success) analysis, as well as on active
cooperative perception and planning under uncertainty. A brief overview
of past and running projects on soccer robots, rescue robots and mobile
robots cooperating with a camera network to interact with people will
be presented.
|
- Links: Speaker info
116 Seminar 10-6-2010- Speaker: Júlia Borràs ()
- Title: Singularity-invariant leg rearrangements in Stewart-Gough platforms
- Abstract:
|
This work presents a necessary and sufficient condition to define a singularity-invariant leg
rearrangement, based on an affine relation between the squared leg lengths before and after the
rearrangement. This condition is then specified for four rigid components that can occur in
Stewart-Gough platforms, leading to the characterization of singularity-invariant leg rearrangements
on all of them.
|
- Links: Speaker info, ARK-2010
115 Seminar 9-6-2010- Speaker: Stephan Strahl ()
- Title: Experimental Study and Numerical Model Analysis of an Open Cathode Self Humidified PEMFC System
- Abstract:
|
Open cathode, self humidified PEM fuel cell (OCSH-PEMFC) systems have an intrinsic* *advantage over conventional systems due to their minimal peripheral components and high system power densities, however they
tend to be affected by environmental conditions, operating modes and load changes. The main reason for this sensitivity is water distribution. Thus, fundamental understanding of water distribution and transport
is imperative in this highly dynamic system, which can be strongly affected by different control strategies. In this context, a two-dimensional, non-isothermal, dynamic model of an OCSH-PEMFC was developed and
used in conjunction with a custom built test station and environmental chamber. With these tools a comprehensive analysis of the system performance under a wide range of environmental and operating conditions
associated with their internal physical phenomena is presented. This model is used to simulate and study the effects of water transport/distribution and their influence on the system performance in order to
develop new water management control strategies to improve efficiency and operating range of a commercially available OCSH-PEMFC system.
The model consists of three sub-models based on energy, momentum and water mass balances of the system applied to anode, cathode channel, diffusion layers and MEA. The model is also applicable to other PEMFC
systems, following the developed modeling strategy and performing the proposed experiments in order to determine the particular coefficients.
|
- Links: Speaker info
Seminar 3-6-2010- 114 Speaker: Michael Villamizar ()
- Title: Efficient Rotation Invariant Object Detection using Boosted Random Ferns
- Abstract:
|
We present a new approach for building an efficient and robust classifier for the two class
problem, that localizes objects that may appear in the image under different orientations.
In contrast to other works that adddress this problem using multiple classifiers, each one
specialized for a specific orientation, or using multi-class classifiers, we propose a more
straightforward approach that consists of two simple stages, namely estimation and classification.
The estimator yields an initial object orientation hypothesis, which is then used by the classifier.
False positive orientations provided by the estimator are rejected during the classification stage.
This methodology allows reducing the time complexity of the algorithm while classification results
remain high. The classifier we use in both stages is based on a boosted combination of Random Ferns
over local histograms of oriented gradients (HOGs) in order to capture local statistics from
gradient-based features. These are also another remarkable differences with respect to current
methods where Random Ferns are computed over image intensity domain and without a supervised
learning. We evaluate our method on standard databases, and show that it yields competitive
results comparable to state-of-the-art approaches while being significantly more efficient.
Furthermore, a new database for object detection under in-plane rotations is presented. This
dataset contains motorbike instances with challenging conditions such as cluttered background,
different illumination conditions and partial occlusions.
|
- Links: Speaker info, CVPR-2010, Paper.
- 113 Speaker: Eduard Serradell ()
- Title: Combining Geometric and Appearance Priors for Robust Homography Estimation
- Abstract:
|
The homography between pairs of images are typically computed from the
correspondence of keypoints, which are established by using image
descriptors. When these descriptors are not reliable, either because of
repetitive patterns or large amounts of clutter, additional priors need to
be considered. The Blind PnP algorithm makes use of geometric priors to
guide the search for matches while computing camera pose. Inspired by
this, we propose a novel approach for homography estimation that combines
geometric priors with appearance priors of ambiguous descriptors. More
specifically, for each point we retain its best candidates according to
appearance. We then prune the set of potential matches by iteratively
shrinking the regions of the image that are consistent with the geometric
prior. We can then successfully compute homographies between pairs of
images containing highly repetitive patterns and even under oblique
viewing conditions.
|
- Links: Speaker info
112 Seminar 27-5-2010- Speaker: René Alquezar ()
- Title: Comparing Error Minimized Extreme Learning Machines and Support Vector Sequential Feedforward Neural Networks for Classification Problems
- Abstract:
|
Recently, error minimized extreme learning machines (EM-ELMs) have
been proposed as a simple and efficient approach to build
single-hidden-layer feedforward networks (SLFNs) sequentially. They
add random hidden nodes one by one (or group by group) and update
the output weights incrementally to minimize the sum-of-squares
error in the training set. Other very similar methods that also
construct SLFNs sequentially had been reported earlier with the main
difference that their hidden-layer weights are a subset of the data
instead of being random. By analogy with the concept of support
vectors original of support vector machines (SVMs), these approaches
can be referred to as support vector sequential feedforward neural
networks (SV-SFNNs). An experimental study on ten benchmark
classification data sets, comparing EM-ELMs and SV-SFNNs, was
carried out under the same conditions for the two models. Although
both models have the same (efficient) computational cost, a
statistically significant improvement in generalization performance
of SV-SFNNs vs. EM-ELMs was found in six out of the ten benchmark
problems.
|
- Links: Speaker info, Paper
111 Seminar 21-5-2010- Speaker: Raffaele Di Gregorio ()
- Title: Determination of singularity loci properties in fully-parallel manipulators through Laplace expansions
- Abstract:
|
In parallel mechanisms, singular configurations (singularities) have
to be avoided during motion. All the singularities should be located
in order to avoid them. Hence, relationships involving all the
singular platform poses (singularity locus) and the mechanism
geometric parameters are useful in the design of parallel mechanisms.
A "simple" expression of the singularity condition of the most general
mechanism (6-6 FPM) of a class of parallel mechanisms usually named
fully-parallel mechanisms (FPM) is deduced by using a particular
Laplace expansion of its Jacobian's determinant. The presented
expression uses the mixed products of vectors that are easy to be
identified on the mechanism. This approach will permit some
singularities to be geometrically found. A procedure, based on this
expression, is provided to transform the singularity condition into a
ninth-degree polynomial equation whose unknowns are the platform pose
parameters. This singularity polynomial equation is cubic in the
platform position parameters and a sixth-degree one in the platform
orientation parameters.
Finally, how to derive the expression of the singularity condition of
a specific FPM from the presented 6-6 FPM singularity condition will
be shown along with an example.
|
- Links: Speaker info, Slides
110 Seminar 12-5-2010- Speaker: Salvador de Lira ()
- Title: PEM Fuel Cell Model oriented to Fault Diagnosis
- Abstract:
|
PEM fuel cells are considered to have the highest energy density due to the
nature of the reaction and the quickest start up time without pollution. These
are the main reasons for being used in applications such as automotive engines,
portable and backup power applications. Recent years have seen a proliferation
of PEM FC system optimization and control applications, where the aim is to
obtain a better process performance.
This presentation addresses the problem of a model based fault diagnosis
methodology for a PEM fuel cell system as case study. The methodology is
based on computing residuals, which are obtained by PEM FC system model
which has been calibrated using real data. The innovation of this methodology
is based on the characterization of the relative residual fault sensitivity. To
illustrate the results, a non-linear fuel cell simulator is used.
|
- Links: Speaker info
Seminar 29-4-2010- 109 Speaker: Júlia Borràs ()
- Title: A Family of Quadratically-Solvable 5-SPU Parallel Robots
- Abstract:
|
A 5-SPU robot with collinear universal joints is well suited to handling an axisymmetric tool,
since it has 5 controllable DoFs and the remaining one is a free rotation around the tool. The
kinematics of such a robot having also coplanar spherical joints has previously been studied as a
rigid subassembly of a Stewart-Gough platform, it being denoted a line-plane component. It was shown
that this component has 8 assembly modes corresponding to the roots of a bi-quartic polynomial. Here
we identify a whole family of these 5-SPU robots having only 4 assembly modes, which are obtained by
solving two quadratic equations. This family is defined by a simple proportionality constraint
relating the coordinates of the base and platform attachments. A geometric interpretation of the
architectural singularities of this type of robots in terms of conics is provided, which facilitates
their avoidance at the design stage. Parallel singularities obey also a neat geometric structure,
which permits deriving a cell decomposition of configuration space. Two practical features of these
quadratically-solvable robots are the large maneuverability within each connected component and the
fact that, for a fixed orientation of the tool, the singularity locus reduces to a plane.
|
- Links: Speaker info, ICRA-2010
- 108 Speaker: Patrick Grosch ()
- Title: Motion Planning for a Novel Reconfigurable Parallel Manipulator with Lockable Revolute Joints
- Abstract:
|
This paper introduces a class of parallel robots consisting
of a fixed base and a moving platform connected by serial
chains having RR_PS
(Revolute-Revolute-Prismatic-Spherical) topology. Only the
prismatic joint is actuated and the first revolute joint in
the chain can be locked or released online. The
introduction of these lockable joints allow the prismatic
actuators to manoeuver to approximate 6-DoF motions for the
moving platform. An algorithm for generating these
maneuvers is first described. Then, a motion planner, based
on the generation of a Probabilistic RoadMap (PRM) whose
nodes are connected using the presented maneuvers, is
presented. The generated trajectories avoid singularities
and possible collisions between legs.
|
- Links: Speaker info, ICRA-2010
107 Seminar 22-4-2010- Speaker: Sergi Foix ()
- Title: Object Modeling using a ToF Camera under an Uncertainty Reduction Approach
- Abstract:
|
Time-of-Flight (ToF) cameras deliver 3D images at 25 fps, offering great
potential for developing fast object modeling algorithms. Surprisingly,
this potential has not been extensively exploited up to now. A reason for
this is that, since the acquired depth images are noisy, most of the
available registration algorithms are hardly applicable. A further
difficulty is that the transformations between views are in general not
accurately known, a circumstance that multi-view object modeling
algorithms do not handle properly under noisy conditions. In this work, we
take into account both uncertainty sources (in images and camera poses) to
generate spatially consistent 3D object models fusing multiple views with
a probabilistic approach. We propose a method to compute the covariance of
the registration process, and apply an iterative state estimation method
to build object models under noisy conditions.
|
- Links: Speaker info, ICRA-2010
106 Seminar 21-4-2010- Speakers: Enric Asunción and Eduard Castañeda (, )
- Title: PEM Fuel Cell Propulsion System
- Abstract:
|
The project aim is based on the undeniable fact that nowadays humanity
development is dramatically linked to the energy consumption. Our social
and industrial way of life wastes in minutes what has need millions to be
generated and creates residues that become hazardous thousands of years.
But even thought, there is a bigger problem, there are not enought
reserves that guarantee our growth level for the next half of the century.
As a result we focus our end of degree project on Proton Exchange Membrane
(PEM). PEM uses hydrogen as energetic vector to produce electricity by a
simple catalytic process. To test that capabilities we will try to face
to face our PEM prototype with a self transportation device with its own
power supply system. This device target will be a Segway RMP-200 and more
specifically the NiMH power supply batteries on the package.
The Project Step by Step:
Segway power supply characterization. Modeling operating load profiles. Pre-design of the power supply system using hydrogen fuel cells. Implementation of the Power supply prototype. Lab testing of the Prototype. Final design. On board Testing.
|
- Links: Speaker info, Speaker info, Project Brochure
105 Seminar 8-4-2010 (Cancelled by the speaker)- Speaker: Oscar Sandoval ()
- Title:
- Abstract:
- Links: Speaker info
104 Seminar 11-3-2010- Speaker: Alejandro Agostini ()
- Title: Interactive Learning of Action Rules for Decision Making
- Abstract:
|
Learning action rules on-line, from an empty rule base, and using them immediately for decision
making involve many difficulties. On-line learning demands techniques that rapidly adjust their
estimation with new incoming examples. Additionally, if decision making is to occur intertwined
with learning, learned rules should become available as soon as possible to assure an improvement
in performance, and to achieve the goal in a reasonable amount of time. For this, rules should be
learned from few experiences of actions relevant for the task, and decision making should not be
time consuming.
Most machine learning techniques are designed to work in batch mode, i.e. when the samples for
learning are available in advance, and use an iterative process that requires a significant
amount of data and computation. The mentioned requirements for rule learning and decision
making pose obstacles for the existing rule learning paradigms, where on-line learning is
not considered, a significant amount of prior knowledge has to be provided, or a large number
of experiences are required.
This talk proposes a method for on-line learning of action rules from few observations using a
rule performance evaluation based on densities. It is also presented a method for macro rules
generation using a new technique of condition propagation that avoids large computational cost
to make decisions. Macro rules could significantly reduce the amount of deliberation as they
might merge repetitive sequences of actions, or plans found with a large computational cost.
Other approaches have focused on the generation of macros such as primitive behaviors,
macro-actions, or activation rules. They explore different long-term acting
behaviors to select the one suitable for the task which requires a large amount of computation.
The learning mechanisms are embedded in a Decision Making Framework (DMF) that closes effectively
the planning-learning loop. The DMF integrates: the rule learning methods, a planner, and an expert
teacher that guides action executions.
|
- Links: Speaker info
103 Seminar 3-3-2010- Speaker: Ana Gabriela Guzmán ()
- Title: Técnicas y Herramientas para el análisis de sistemas de gran escala: Aplicación a la Red de Transporte de Aguas de Barcelona
- Abstract:
|
See the associated document.
|
- Links: Abstract
102 Seminar 2-2-2010- Speaker: Vanesa García ()
- Title: Modelling and control of catalytic reactors for the production of of hydrogen for PEM fuel cells
- Abstract:
|
See the associated document.
|
- Links: Abstract
101 Seminar 21-1-2010- Speaker: Sergi Foix ()
- Title: ToF cameras applied to 3D object modelling
- Abstract:
|
This Master's thesis has two main contributions. Firstly, reviews the state-of-the art in the field
of Time-of-Flight (ToF) cameras, their advantages, their limitations, the existing calibration
methods and their present-day applications sometimes in combination with other sensors. And
secondly, proposes a method for object modelling using a ToF camera under an uncertainty
reduction approach.
Even though ToF cameras provide neither higher resolution nor larger ambiguity-free range
compared to other range map estimation systems, advantages such as registered depth and
intensity data at a high frame rate, compact design, low weight and reduced power consumption
have motivated their use in numerous areas of research. In robotics, these areas range from
mobile robot navigation and map building to vision-based human motion capture and gesture
recognition, showing particularly a great potential in object modelling and recognition.
ToF cameras deliver 3D images at 25 fps, offering great potential for developing fast object
modelling algorithms. Surprisingly, this potential has not been extensively exploited up to
now. A reason for this is that, since the acquired depth images are noisy, most of the available
registration algorithms are hardly applicable. A further difficulty is that the transformations
between views are in general not accurately known, a circumstance that multiview object modelling
algorithms do not handle properly, especially under noisy conditions. In this work, both
uncertainty sources (in images and camera poses) to generate spatially consistent 3D object
models fusing multiple views with a probabilistic approach are taken into account. A method
to compute the covariance of the registration process is proposed, and a statistical framework
applied to build object models under noisy conditions.
|
- Links: Master Project
100 Seminar 17-12-2009- Speaker: Aleix Martínez ()
- Title: Bayes Optimal Pattern Recognition
- Abstract:
|
Many engineering and scientific problems can be formulated as a pattern recognition one. In such problems, linear methods are preferred for their simplicity and tractability. Unfortunately, linear methods have many limitations, of which several are still unknown. Understanding these limitations is key to advancing the current state of the art. In this talk, we will address these issues within the context of feature extraction and classification. We will define when linear feature extraction methods do not work and how this knowledge can be used to propose algorithms that are guaranteed to work in a large number of applications. Several results in vision, linguistics, and the modeling of the primary visual cortex will be presented. Time permitting, we will sketch the problem posed by classical normalization procedures. In particular, that of norm normalization, generally used to make texture invariant to the intensity of the light source, shape to scale and rotation, and for modeling mtDNA in genetics. This result will lead us to the definition on of new type of kernels -- Rotation Invariant Kernels -- which are specially useful in shape analysis problems. Open problems will be outlined during the course of the talk.
|
- Links: Web page
99 Seminar 3-12-2009- Speaker: Rafael Valencia ()
- Title: 3D Mapping for Urban Service Robots
- Abstract:
|
We present an approach to the problem of 3D map building in urban settings for service robots, using three dimensional laser range scans as the main sensor data input. Our system is based on the probabilistic alignment of 3D point clouds employing a delayed-state information-form SLAM algorithm, for which we can add observations of relative robot displacement efficiently. These observations come from the alignment of dense range data point clouds computed with a variant of the iterative closest point algorithm. The datasets were acquired with our custom built 3D range scanner integrated into a mobile robot platform. Our mapping results are compared to a GIS-based CAD model of the experimental site. The results show that our approach to 3D mapping performs with sufficient accuracy to derive traversability maps that allow our service robots navigate and accomplish their assigned tasks on a urban pedestrian area.
|
- Links: IROS-09
98 Seminar 2-12-2009- Speaker: Vicenç Puig ()
- Title: Resultados y Perspectivas en el modelado y control de redes relacionadas con el ciclo integral del agua
- Abstract:
|
En esta charla, Vicenç hablará acerca de diversos trabajo desarrollados (o en desarrollo) dentro de las actividades del grupo SAC (Sistemes Avançats de Control), todos ellos relacionados con el modelado y control de redes de agua potable, redes de alcantarillado y redes de canales y riego. Adicionalmente, se comentarán diversos matices en cuanto a investigaciones no sólo ligadas con el modelado dinámico y gestión de tales redes, sino también temas de calidad del agua, propagación de cloro, eficiencia de gestión de redes, entre otros tópicos.
|
- Links:
97 Seminar 19-11-2009- Speaker: Peter Stone ()
- Time: 16:00
- Title: Intersections of the Future: Using Fully Autonomous Vehicle
- Abstract:
|
Artificial intelligence research is ushering in a new era of
sophisticated, mass-market transportation technology. While computers
can already fly a passenger jet better than a trained human pilot,
people are still faced with the dangerous yet tedious task of driving
automobiles. Intelligent Transportation Systems (ITS) is the field of
study that aims to use artificial intelligence to make transportation
safer, cheaper, and more efficient. Recent advances in ITS point to a
future in which vehicles themselves handle the vast majority of the
driving task. Once autonomous vehicles become popular, autonomous
interactions amongst *multiple* vehicles will be possible. Current
methods of vehicle coordination, which are all designed to work with
human drivers, will be outdated. The bottleneck for roadway
efficiency will no longer be the drivers, but rather the mechanism by
which those drivers' actions are coordinated. While open-road driving
is a well-studied and more-or-less-solved problem, urban traffic
scenarios, especially intersections, are much more challenging.
This talk will address the question: To what extent and how can a
multiagent intersection control mechanism take advantage of the
capabilities of autonomous vehicles in order to make automobile travel
safer and faster? First, I will introduce and specify the
problem of intersection management as a multiagent system and define a
metric by which solutions can be evaluated. Next, I will propose a
novel multiagent intersection control mechanism in which autonomous
driver agents call ahead and reserve space-time in the
intersection, pending the approval of an arbiter agent called
an intersection manager, which is located at the intersection.
Experiments indicate that our method can reduce delays at
intersections by up to two orders of magnitude.
|
- Links: Web page
96 Seminar 5-11-2009- Speaker: Jacques Penders
- Title: A robot Swarm assisting a Human Fire Fighter
- Abstract:
|
Emergencies in industrial warehouses are a major concern for fire fighters. The large dimensions together with the development of dense smoke that drastically reduces visibility, represent major challenges.
The Guardians robot swarm is designed to assist fire fighters in searching a large
warehouse. In this talk I discuss the technology developed for a swarm of robots assisting fire fighters. I will briefly explain the swarming algorithms which provide the functionality by which the robots react to and follow humans. Next I discuss the wireless communication system, which is a so-called mobile ad-hoc network. The communication network provides also the means to locate the robots and humans. Thus the robot swarm is able to provide guidance information to the humans. Together with the fire fighters the team explored how the robot swarm should feed information back to the human fire fighter. We have designed and experimented with interfaces for presenting swarm based information to human beings.
To conclude: the interaction from the human to the robots is very distinct from the interaction of the robots with the human.
Simply by moving around a human being provokes reactions from the autonomous robots; the swarming algorithms provide this functionality. Thus the human to robots swarm interface requiring very little cognitive effort. The robots can transfer guidance information to the human. In collaboration with the fire fighters several interfaces for obtaining guidance from the surrounding robot swarm have been designed and tested. Nevertheless, it is an outstanding issue whether a feel of confidence can be created.
|
- Links: Project
95 Seminar 21-10-2009- Speaker: Sergey V. Ablameyko ()
- Title: Joint interpretation of remote sensing images and digital maps
- Abstract:
- Links: Web page
Seminar 9-10-2009- 94 Speaker:
Andreu Corominas ()
- Title: Integrating Asynchronous Observations for Mobile Robot Position Tracking
in Cooperative Environments
- Abstract:
|
This paper presents an asynchronous particle filter algorithm for mobile
robot position tracking, taking into account time considerations when
integrating observations being delayed or advanced from the prior
estiamate time point. The interest of that filter lies in cooperative
environments and in fast vehicles. The paper studies the first case, where
a sensor network shares perception data with running robots that receive
accurate obeservations with large delays due to acquisition, processing
and wireless communications. Promising simulated results comparing a basic
particle filter and the proposed one are shown. The paper also
investigates a situation where a robot is tracking its position, fusing
only odometry and observations from a camera network partially covering
the robot path.
|
- Links: IROS-09
- 93 Speaker: Juan Andrade-Cetto ()
- Title: Calibrating an Outdoor Distributed Camera Network Using Laser Range Finder Data
- Abstract:
|
Outdoor camera networks are becoming ubiquitous in critical urban areas of large cities around the world. Although current applications of camera networks are mostly limited to video surveillance, recent research projects are exploiting advances on outdoor robotics technology to develop systems that put together networks of cameras and mobile robots in people assisting tasks. Such systems require the creation of robot navigation systems in urban areas with a precise calibration of the distributed camera network. Despite camera calibration has been an extensively studied topic, the calibration (intrinsic and extrinsic) of large outdoor camera networks with no overlapping view fields, and likely to suffer frequent recalibration, poses novel challenges in the development of practical methods for user-assisted calibration that minimize intervention times and maximize precision. In this paper we propose the utilization of Laser Range Finder (LRF) data covering the area of the camera network to support the calibration process and develop a semi-automated methodology allowing quick and precise calibration of large camera networks. The proposed methods have been tested in a real urban environment and have been applied to create direct mappings (homographies) between image coordinates and world points in the ground plane (walking areas) to support person and robot detection and localization algorithms.
|
- Links: IROS-09
92 Seminar 7-10-2009- Speaker: Attila Husar ()
- Title: Dynamic Water Management Test Station for Open-Cathode PEMFC Systems
- Abstract:
|
Hydrogen fed polymer electrolyte membrane fuel cells (PEMFC) are energy conversion devices that can be implemented into a wide range of applications such as automotive, stationary and portable systems. However, to optimize performance, they require active control and thus in-depth understanding of the system dynamics.
Understanding water transport mechanisms through the membrane and membrane water content is one of the keys to improving PEMFC system performance. Once these mechanisms are identified and modelled, effective control strategies can be implemented. Hence, the main objective of this test station design is to experimentally characterize the water transport mechanisms through the membrane and its water content for the purpose of studying their dynamic influence on fuel cell system performance for numerical model verification and validation. The analysis will then lead to an in-depth understanding of how a system with minimal parts and complexity can be improved in terms of overall efficiency, stability and operating rage. These conclusions will provide guidelines to develop a proper control strategy with the necessary sensors to ensure that the system operates properly under a wide range of environmental conditions.
|
- Links:
Seminar 1-10-2009- 91 Speaker: Anaís Garrell ().
- Title: Discrete Time Motion Model for Guiding People in Urban Areas Using Multiple Robots
- Abstract:
|
We present a new model for people guidance in urban settings using one or several mobile robots, that overcomes the limitations of existing approaches, which are either tailored to tightly bounded environments, or based on unrealistic human behaviors. Although the robots motion is controlled by means of a standard particle filter formulation, the novelty of our approach resides in how the environment and human and robot motions are modelled. In particular we define a Discrete-Time-Motion model, which from one side represents the environment by means of a potential field, that makes it appropriate to deal with open areas, and on the other hand the motion models for people and robots respond to realistic situations, and for instance human behaviors such as leaving the group are considered.
|
- Links: IROS-09
- 90 Speaker: Guillem Alenyà ()
- Title: A Comparison of Three Methods for Measure of Time to Contact
- Abstract:
|
Time to Contact (TTC) is a biologically inspired method for obstacle detection and reactive control of motion that does not require scene reconstruction or 3D depth estimation. Estimating TTC is difficult because it requires a stable and reliable estimate of the rate of change of distance between image features. In this paper we propose a new method to measure time to contact, Active Contour Affine Scale (ACAS). We experimentally and analytically compare ACAS with two other recently proposed methods: Scale Invariant Ridge Segments (SIRS), and Image Brightness Derivatives (IBD). Our results show that ACAS provides a more accurate estimation of TTC when the image flow may be approximated by an affine transformation, while SIRS provides an estimate that is generally valid, but may not always be as accurate as ACAS, and IBD systematically over-estimate time to contact.
|
- Links: IROS-09
Seminar 17-9-2009- 89 Speaker: Guillem Alenyà ()
- Title: Time To Contact for Obstacle Avoidance
- Abstract:
|
Time to Contact (TTC) is a biologically inspired method for obstacle detection and reactive control of motion that does not require scene reconstruction or 3D depth estimation. TTC is a measure of distance expressed in time units. Our results show that TTC can be used to provide reactive obstacle avoidance for local navigation. In this paper we describe the principles of time to contact and show how time to contact can be measured from the rate of change of size of features. We show an algorithm for steering a vehicle using TTC to avoid obstacles while approaching a goal. We present the results of experiments for obstacle avoidance using TTC in static and dynamic environments.
|
- Links: ECMR-09
- 88 Speaker: Juan Andrade-Cetto ()
- Title: Amortized Constant Time State Estimation in SLAM using a Mixed Kalman-Information Filter
- Abstract:
|
The computational bottleneck in all information-based algorithms for SLAM is the recovery of the state mean and covariance. The mean is needed to evaluate model Jacobians and the covariance is needed to generate data association hypotheses. Recovering the state mean and covariance requires the inversion of a matrix of the size of the state. Current state recovery methods use sparse linear algebra tools that have quadratic cost, either in memory or in time. In this paper, we present an approach to state estimation that is worst case linear both in execution time and in memory footprint at loop closure, and constant otherwise. The approach relies on a state representation that combines the Kalman and the information-based state representations. The strategy is valid for any SLAM system that maintains constraints between robot poses at different time slices. This includes both Pose SLAM, the variant of SLAM where only the robot trajectory is estimated, and hierarchical techniques in which submaps are registered with a network of relative geometric constraints.
|
- Links: ECMR-09
87 Seminar 10-9-2009- Speaker: Agustin Ortega ()
- Title: Graph-based Segmentation of Range Data with Applications to 3D Urban Mapping
- Abstract:
|
This paper presents an efficient graph-based algorithm for the segmentation of planar regions out of 3D range maps of urban areas. Segmentation of planar surfaces in urban scenarios is challenging because the data acquired is typically sparsely sampled, incomplete, and noisy. The algorithm is motivated by Felzenszwalb's algorithm to 2D image segmentation , and is extended to deal with non-uniformly sampled 3D range data using an approximate nearest neighbor search. Inter-point distances are sorted in increasing order and this list of distances is traversed growing planar regions that satisfy both local and global variation of distance and curvature. The algorithm runs in O(n log n) and compares favorably with other region growing mechanisms based on Expectation Maximization. Experiments carried out with real data acquired in an outdoor urban environment demonstrate that our approach is well-suited to segment planar surfaces from noisy 3D range data. A pair of applications of the segmented results are shown, a) to derive traversability maps, and b) to calibrate a camera network.
|
- Links: ECMR-09
86 Seminar 9-7-2009- Speaker: Ernesto Homar Teniente ()
- Title: Autonomous 3D Map Building for Urban Settings with Range Data
- Abstract:
|
This thesis proposal addresses the problem of building maps for mobile
robots that navigate in outdoor urban areas. And we wish to do so as
autonomously as possible. In this context, our robot must be able to
build a locally detailed and globally consistent map using 3D range
sensing as the primary source of information. The robot must be able to
determine its position with 6 degrees-of-freedom (DOF) within this map.
This task is known in the robotics literature as Autonomous Simultaneous
Localization and Mapping. Furthermore, from the acquired maps, the robot
must be able to perform traversability analyses to take informed
decissions for navigation and exploration. Once the map is built some
post-processing might be necessary to obtain a complete digital compact
volumetric model, merging information to reduce the memory space of the
map without compromising details and consistency. The presentation
includes a brief analysis of the state of the art in the topic, as well
as some initial contributions on efficient algorithms for range data
registration, map building in the context of the URUS project, and
applications of the produced maps to traversability analysis and camera
network calibration.
|
- Links:
85 Seminar 2-7-2009- Speaker: Carlos Rosales ()
- Title: Motion planning for high DOF anthropomorphic hands
- Abstract:
|
The talk deals with the problem of motion
planning of anthropomorphic mechanical hands avoiding collisions.
The approach that will be presented tries to mimic the real human
hand motions, but reducing the dimension of the search space
in order to obtain results as a compromise between motion
optimality and planning complexity (time) by means of the
concept of principal motion directions. Basically, the work
includes the following phases: capturing the human hand
workspace using a sensorized glove and mapping it to the
mechanical hand workspace, reducing the space dimension by
looking for the most relevant principal motion directions, and
planning the hand movements using a sampling-based roadmap
planner. The approach has been implemented for a four finger
anthropomorphic mechanical hand, and some examples are
will be shown to illustrate its validity.
|
- Links:
84 Seminar 4-6-2009- Speaker: Frank Dellaert
().
- Title: Inference in Large-Scale Graphical Models and its application to SFM,
SAM, and SLAM
- Abstract:
|
Simultaneous Localization and Mapping (SLAM), Smoothing and Mapping
(SAM), and Structure from Motion (SFM) are important and closely
related problems in robotics and vision. Not surprisingly, there is a
large literature describing solutions to each problem, and more and
more connections are established between the two fields. At the same
time, robotics and vision researchers alike are becoming increasingly
familiar with the power of graphical models as a language in which to
represent inference problems. In this talk I will show how SFM, SAM,
and SLAM can be posed in terms of this graphical model language, and
how inference in them can be explained in a purely graphical manner
via the concept of variable elimination. I will then present a new way
of looking at inference that is equivalent to the junction tree
algorithm yet is - in my view- much more insightful. I will also show
that, when applied to linear(ized) Gaussian problems, the algorithm
yields the familiar QR and Cholesky factorization algorithms, and that
this connection with linear algebra leads to strategies for very fast
inference in arbitrary graphs. I will conclude by showing some
published and preliminary work that exploits this connection to the
fullest.
|
- Links:
83 Seminar 21-5-2009- Speaker: Michael Villamizar ()
- Title: Combining Color-Based Invariant Gradient Detector with HoG Descriptors
for Robust Image Detection in Scenes under Cast Shadows
- Abstract:
|
In this work we present a robust detection method
in outdoor scenes under cast shadows using color based
invariant gradients in combination with HoG local features.
The method achieves good detection rates in urban scene
classification and person detection outperforming traditional
methods based on intensity gradient detectors which are sensible
to illumination variations but not to cast shadows. The
method uses color based invariant gradients that emphasize
material changes and extract relevant and invariant features
for detection while neglecting shadow contours. This method
allows to train and detect objects and scenes independently of
scene illumination, cast and self shadows. Moreover, it allows
to do training in one shot, that is, when the robot visits the
scene for the first time.
|
- Links:
82 Seminar 23-4-2009- Speaker: Viorela Ila ()
- Title: Information-based Compact Pose SLAM
- Abstract:
|
Pose SLAM is the variant of SLAM where only the robot trajectory is estimated
and where landmarks are only used to produce relative constraints between robot
poses. To reduce the computational cost of the information filter form of Pose
SLAM and, at the same time, to delay inconsistency as much as possible, we
introduce an approach that only takes into account highly informative
loop closure links and non redundant poses. The technique includes constant time
procedures to compute the distance between poses and the potential information
gain obtained from each link, as well as an approximately linear procedure in terms of
time and memory, to recover the state after a loop closure. Using
these procedures, the robot operates most of the time in open loop, amortizing
the cost of loop closure over long trajectories. In this case, the computational
bottleneck shifts to data association, that is, to a search over the set of previously
visited poses to determine good candidates for sensor registration. To speed up data association,
we introduce a method to search for neighboring poses whose complexity
ranges from logarithmic in the usual case to linear in degenerate
situations. The method is based on organizing the pose information in
a balanced tree whose internal levels are defined using interval arithmetic.
The proposed method is validated through simulations, experiments using
standard SLAM data sets, and real mapping sessions.
|
- Links:
81 Seminar 16-4-2009- Speaker: Júlia Borràs ()
- Title: Kinematics of Line-Plane Subassemblies in Stewart Platforms
- Abstract:
|
When the attachments of five legs in a Stewart platform are collinear on one
side and coplanar on the other, the platform is said to contain a line-plane
subassembly. This talk is devoted to the kinematics analysis of this
subassembly paying particular attention to the problem of moving the
aforementioned attachments without altering the singularity locus of the
platform. It is shown how this is always possible provided that some
cross-ratios between lines ---defined by points in the plane--- are kept
equal to other cross-ratios between points in the line. This result leads to
two simple motion rules upon which complex changes in the location of the
attachments can be performed. These rules have interesting practical
consequences as they permit a designer to optimize aspects of a parallel
robot containing the analyzed subassembly, such as its manipulability in a
given region, without altering its singularity locus.
|
- Links:
80 Seminar 2-4-2009- Speaker: Stan Matwin ()
- Title: Computer Ethics and Professional Responsibility Course for Computer Professionals
- Abstract:
|
In this presentation I will discuss a course I have developed at the
University of Ottawa, Canada, that covers the ethical, legal and social
issues important for computer professionals. I will describe the
contents of the course that include: an introduction to computer ethics
and how to apply it in practice, privacy in the electronic era, social
implications of the Internet, computer failures and legal
responsibility, professional codes of conduct, global issues including
digital divide, and the ethical issues related to robotics and
autonomous computing. I will describe my experience and the student
experience from three years of teaching this course in Ottawa. I will
discuss a sample textbook and exam material for this course. I will
argue that such a course (already a compulsory component of the ACM/IEEE
curriculum in all computer science and engineering disciplines) truly
belongs, for academic and moral reasons, to any modern information
technology program.
|
- Links: Web page,
Slides.
79 Seminar 19-3-2009 (Cancelled by the speaker)- Speaker: Joan Solà ()
- Title:
- Abstract:
- Links:
78 Seminar 12-3-2009- Speaker: Paul Verschure ()
- Title: Brain based models for robot perception, cognition and behavior
- Abstract:
|
The brain is still the most advanced system for perception, cognition
and control that we know. Unfortunately we still do not have a theory
of the brain that would allow us to copy neuronal principles to
artifacts. Over the last few years, however, a number of inroads have
been made in the areas of perception, learning and motor control. In
my talk I will focus on our own work within the framework of the
Distributed Adaptive Control architecture and its implications for our
understanding of the neuronal principles underlying real-world
perceptual systems, mapping and localization and the planning of
discrete motor actions and the generalization of these principles
towards robots, avatars and neuroprosthetic systems.
|
- Links: Lab web page
77 Seminar 5-3-2009- Speaker: Alba Pérez ()
- Title: Some open problems in kinematic synthesis
- Abstract:
|
Kinematic synthesis aims to solve the function-to-form problem when
dealing with motion. It has its origins in the graphical design of
planar mechanisms and it is now applied to spatial mechanisms and
robotic systems. One of the branches of kinematic synthesis is
dimensional synthesis, in which the structure (also called topology)
of the system is given and the goal is to dimension it in order to
accomplish a given kinematic task.
In this talk, I want to present some of the unsolved problems within
the dimensional synthesis of kinematic chains for spatial motion. A
brief introduction to different approaches and their limitations will
be given, to then focus on the use of Clifford algebras to express the
synthesis problem. Several applications in the field of robot design
and motion identification will be presented.
|
- Links:
76 Seminar 26-2-2009- Speaker: Lina M. Paz ()
- Title: Fast 3D Maps using Vision Only
- Abstract:
|
In this talk I will describe a system that can carry out SLAM in large indoor and outdoor environments using a stereo
pair moving with 6DOF as the only sensor. Unlike current visual SLAM systems that use either bearing-only monocular
information or 3D stereo information, our system accommodates both monocular and stereo. Textured point
features are extracted from the images and stored as 3D points if seen in both images with sufficient disparity, or stored as
inverse depth points otherwise. This allows to map both near and far features: the first provide distance and orientation, and the
second orientation information. Unlike other vision only SLAM systems, stereo does not suffer from scale drift because of
unobservability problems, and thus no other information such as gyroscopes or accelerometers is required in our system. Our
SLAM algorithm generates sequences of conditionally independent local maps that can share information related to the camera
motion and common features being tracked. The system computes the full map using the novel Conditionally Independent
Divide and Conquer algorithm, which allows constant time operation most of the time, with linear time updates to compute the
full map. To demonstrate the robustness and scalability of our system, I will show experimental results in indoor and
outdoor urban environments of 210m and 140m loop trajectories, with the stereo camera being carried in hand by a person
walking at normal walking speeds of 4-5km/hour.
|
- Links: Abstract in PDF, Web.
75 Seminar 6-2-2009- Speaker: René Motro ()
- Title: Structural Morphology of Tensegrity Systems and Foldability
- Abstract:
|
The coupling between form and forces, their structural morphology, is
a key point for tensegrity systems. In the first part of this paper we
describe the design process of the simplest tensegrity system which
was achieved by Kenneth Snelson. Some other simple cells are presented
and tensypolyhedra are defined as tensegrity systems which meet
polyhedra geometry in a stable equilibrium state. A numerical model
giving access to more complex systems, in terms of number of
components and geometrical properties, is then evoked. The third part
is devoted to linear assemblies of annular cells -tensegrity rings-
which can be folded. Some experimental models of the tensegrity ring
which is the basic component of this "hollow rope" have been realized
and are examined. The last part is devoted to some possible foldable
tensegrity systems.
|
- Links:
74 Seminar 11-12-2008- Speaker: Juan Cortés ()
- Title: Path Planning in Structural Biology
- Abstract:
|
Path planning is an active field of research in robotics since the 70s. The addressed problem consists of computing feasible motions for a system (the robot) in a workspace cluttered with obstacles. In recent years, path planning techniques have undergone considerable progress. Sampling-based algorithms are efficient and general tools for exploring constrained high-dimensional spaces. Such algorithms have been successfully applied to challenging problems in diverse domains, including computational structural biology. This seminar gives an overview of recent works carried out at LAAS-CNRS in this domain. In particular, I will present path-planning-based algorithms for computing protein loop/domain motions and protein-ligand access/exit pathways. I will also show encouraging results obtained with these methods on real application examples.
|
- Links:
73 Seminar 4-12-2008- Speaker: Francesc Moreno ()
- Title: EPnP: An Accurate O(n) Solution to the PnP Problem
- Abstract:
|
I will present a non-iterative solution to the PnP problem --the estimation of the pose of a calibrated camera from n 3D-to-2D point correspondences-- whose computational complexity grows linearly with n. This is in contrast to state-of-the-art methods that are O(n^5) or even O(n^8), without being more accurate. Our method is applicable for all n>=4 and handles properly both planar and non-planar configurations. Our central idea is to express the n 3D points as a weighted sum of four virtual control points. The problem then reduces to estimating the coordinates of these control points in the camera referential, which can be done in O(n) time by expressing these coordinates as weighted sum of the eigenvectors of a 12x12 matrix and solving a small constant number of quadratic equations to pick the right weights. Furthermore, if maximal precision is required, the output of the closed-form solution can be used to initialize a Gauss-Newton scheme, which improves accuracy with negligible amount of additional time. The advantages of our method are demonstrated by thorough testing on both synthetic and real-data.
|
- Links:
72 Seminar 27-11-2008- Speaker: Miquel Ferrer ()
- Title: Graph Embedding in Vector Spaces. Application to the Median Graph Computation.
- Abstract:
|
Graphs have very interesting properties for object representation in pattern recognition. However, graph matching algorithms are usually computationally complex. In addition, graphs are harder to manipulate and operate than feature vectors. In the last years, some attempts have been made to combine the best of the graph and the vector domains in order to get the advantages of both worlds. In this sense, kernels offer an elegant way to embed graphs into vector spaces. In this work, we show how graph embedding can be used to obtain accurate and efficient approximations of the median graph. The median graph can be seen as the representative of a set of graphs but its application has been very limited up to now due to computational reasons. With this new approach, we can obtain an approximate median graph using real databases containing large graphs.
|
- Links:
71 Seminar 6-11-2008- Speaker: Léonard Jaillet ()
- Title: Transition-based RRT for Path Planning in Continuous Cost Spaces
- Abstract:
|
We present a method called Transition-based RRT (T-RRT) for path
planning in continuous cost spaces. It combines the exploration
strength of the RRT algorithm that rapidly grow random trees toward
unexplored regions of the space, with the efficiency of stochastic
optimization methods that use transition tests to accept or to
reject a new potential state. This planner also relies on the notion
of minimal work path that gives a quantitative way to compare path
costs. The method integrates self tuning ofa parameter
controlling its exploratory behavior. It yields to solution paths
that efficiently follow low cost valleys and saddle points of
the cost space. Simulation results show that the method can be
applied to a large set of applications including terrain costmap
motions or planning low cost motions for freeflying or articulated robots.
|
- Links:
70 Seminar 28-10-2008- Speaker: Vincent Lepetit ()
- Title: Computer Vision and Augmented Reality
- Abstract:
|
I will present recent advances in Computer Vision for Augmented
Reality, and their commercial applications. I will also discuss the limits of the
current techniques, and the possible directions to go beyond.
|
- Links: Web page
69 Seminar 24-10-2008- Speaker: Alejandro Agostini ()
- Title: Online Reinforcement Learning using Samples Density Estimations
- Abstract:
|
Online reinforcement learning with generalization is a problem still
unsolved for many complex applications. The main obstacles are produced by
the high non-stationarity of the estimated cumulative reward, the online
nature of the learning with non-uniform sampling, and the large amount of
generalization required for a feasible implementation. Our previous
approaches to face the RL problem consisted in estimating the probability
distribution of the cumulative reward in coarse discrete partitions of the
state space using a rule-based representation. The discrete partition and
the biased sampling inherent to RL produced bad estimations of the
cumulative reward due to the limited information about the real
distribution of data that fed the rules. To overcome this inconvenient we
propose a new RL approach based on a joint distribution estimation of the
samples (state, action, cumulative reward) experienced. From this joint
distribution it is possible to estimate the distribution of the cumulative
reward with the highest confidence possible given the data experienced so
far. The joint distribution is modelled with a Gaussian Mixture estimated
with the online expectation-maximization algorithm and with active unit
manipulation.
|
- Links:
68 Seminar 2-7-2008- Speaker: Christophe Jermann ()
- Title: From numerical analysis to interval constraint solving - a tutorial with case studies in robotics
- Abstract:
|
Interval constraint solving techniques aim at returning an as-precise-as-desired framing of all the solutions to a system of equations and inequalities over the real numbers. They derive from numerical analysis and artificial intelligence: the numerical computations are performed on intervals instead of real numbers to avoid the inaccuracy of floating-point numbers computations and to enable a complete exploration of the search space; smart filtering techniques are employed in order to avoid searching the solutions in inappropriate regions of the search space. This talk will introduce these techniques and present their application to some robotics problems studied in the MEO group of the LINA lab to which the speaker belongs.
|
- Links: Home page
67 Seminar 19-6-2008 - Speaker: Fernando de la Torre ()
- Title: Learning the representation for modeling, classification and clustering
problems with energy-based component analysis methods
- Abstract:
|
Selecting a good representation of the data is a key aspect of the success
of any modeling, classification or clustering algorithm. Component Analysis
(CA) methods (e.g. Kernel Principal Component Analysis, Independent
Component Analysis, Tensor factorization) have been used as a feature
extraction step for modeling, classification and clustering in numerous
visual, graphics and signal processing tasks over the last four decades. CA
techniques are especially appealing because many can be formulated as
eigen-problems, offering great potential for efficient learning of linear
and non-linear representations of the data without local minima. However,
the eigen-formulation often hides important aspects of making the learning
successful such as understanding normalization factors, how to build
invariant representations (e.g. to geometric transformation), effects of
noise and missing data or how to learn the kernel. In this talk, I will
describe a unified framework for energy-based learning in CA methods. I will
point out how apparently different learning tasks (clustering,
classification, modeling) collapse into a single task when viewed from the
perspective of energy functions. Moreover, I will propose several
extensions of CA methods to learn linear and non-linear representations of
data to improve performance, over the current use of CA features, in
state-of-the-art algorithms for classification (e.g. support vector
machines), clustering (e.g. spectral graph methods) and modeling/visual
tracking (e.g. active appearance models) problems.
During the talk I will also review applications of CA techniques to
depression assestment, deception detection and hot-flash prediction from
multimodal sensors.
|
- Links: Home page
66 Seminar 4-6-2008- Speaker: Cornel Sultan ()
- Title: Tensegrity in Deployable Structures and Motion Simulations Applications
- Abstract:
|
A brief summary of the history of tensegrity structures opens this talk, which
summarizes the spaker's personal perspective on tensegrity structures. The
technical part of the presentation focuses on two topics which have been
investigated by the speaker in the past: tensegrity structures deployment and
their use as motion base for flight simulators as replacements for the
classical Stewart platform. The talk is concluded with considerations on
tensegrity structures future and the challenges they face, especially in the field
of controllable structures applications.
|
- Links: Home page
65 Seminar 29-5-2008- Speaker: Alberto Sanfeliu ()
- Title: First year report of the URUS project
- Abstract:
|
This talk gives a brief account of the activities developed during the first year of the URUS
project
The talk was previously given in the ICRA'08 workshop
Network Robot Systems: benchmarks and platforms toward Human-Robot Interaction,
co-organized by Alberto Sanfeliu.
|
- Links: URUS project, ICRA08 workshop
64 Seminar 8-5-2008- Speaker: Júlia Borràs ()
- Title: Architecture Singularities in Flagged Parallel Manipulators
- Abstract:
|
Flagged manipulators are of interest because they are the only Stewart-Gough
platforms for which a cell decomposition of their singularity loci is
available. Here we show that the known family of such manipulators can be
enlarged if one allows robot designs that, for some particular parameter
values, become architecturally singular. Along this line, the most general
6-6 flagged manipulator is derived by applying a singularity-preserving
transformation that leaves the relative position between two lines
invariant. This transformation opens up the possibility of an "equal cross
ratios" architectural singularity, which is shown to appear clearly in the
factorization of the jacobian determinant. From the 6-6 flagged manipulator,
all the extended family of (possibly architecturally-singular) flagged
manipulators is derived.
|
- Links: ICRA08 paper
63 Seminar 24-4-2008- Speaker: Andreu Corominas ()
- Title: Efficient Active Global Localization for Mobile Robots Operating in Large and Cooperative Environments
- Abstract:
|
This paper presents a novel and efficient framework to the active
map-based global localization problem for mobile robots operating in
large and cooperative environments. The paper proposes a rational
criteria to select the action that minimizes the expected number of
remaining position hypotheses, for the single robot case and for the
cooperative case, where the lost robot takes advantage of observations
coming from a sensor network deployed on the environment or from other
localized robots. Efficiency in time complexity is achieved thanks to
reasoning in terms of the number of hypotheses instead of in terms of
the belief function. Simulation results in a real outdoor environment of
10.000m2 are presented validating the presented approach and showing
different behaviors for the single robot case and for the cooperative one.
|
- Links: ICRA08 paper
62 Seminar 10-4-2008- Speaker: Pablo Jimenez ()
- Title: Survey on Model-based Manipulation Planning of Deformable Objects
- Abstract:
|
Manipulation of deformable objects constitutes a challenge and a huge
field of opportunities for roboticists, due to the richness in behaviour
and the extended presence of such objects in everyday life. Long-term
and goal-directed interaction of a robot with such objects implies to
provide some kind of model-based planning capabilities. Whereas
manipulation planning of rigid objects, viewed as an offspring of Motion
Planning, is a well-studied subject, works dealing about manipulation
planning of deformable objects are spread over a wide range of
apparently unconnected application areas. This survey constitutes a
first attempt of bringing results together and to present a systematic
approach to the subject. The interested researcher will find here how
such objects are currently modelled, which basic planning tools are
available, how application-dependent constraints are dealt with and
considered in planning, as well as a lot of inspiring examples.
|
- Links:
61 Seminar 27-3-2008- Speaker: Carlos Rosales ()
- Title: Finding All Valid Hand Configurations for a Given Precision Grasp
- Abstract:
|
Planning a precision grasp for a robot hand is usually decomposed into two main
steps. First, a set of contact points over the object surface must be
determined, ensuring they allow a stable grasp. Second, the inverse kinematics
of the robot hand must be solved to verify whether the contact points can
actually be reached. Whereas the first problem has been largely solved in a
general posing, the second one has only been tackled with
local convergence methods. These methods only provide one solution to the
problem, even if many are possible, and depending on the
initial estimation they use, they may fail to converge, which results in
grasp re-planning in situations where it could be avoided. This paper overcomes
both issues by providing a complete method to solve the kinematics of human-like
hands. The method is able to find all possible configurations that reach the
specified contact points, even when positive-dimensional sets of such
configurations are possible.
|
- Links: ICRA08 paper
60 Seminar 28-2-2008- Speaker: Lluís Ros ()
- Title: Position analysis of multi-loop robots and molecules
- Abstract:
|
This talk presents a numerical method for the position analysis of multi-loop
robots and molecules. The method is general (it can be
applied to single or multiple interconnected loops of arbitrary topology)
and complete (it isolates all solutions, even if they form positive-dimensional
sets). Generality is achieved by reducing the problem to finding all embeddings of
a set of points constrained by pairwise distances, which can be formulated as
computing the roots of a system of Cayley-Menger determinants. Completeness is
achieved by expressing these determinants in Bernstein form and using a numerical
algorithm that exploits such form to bound all root locations at any desired
precision. The method is readily parallelizable, and the current implementation can be run
on single- or multi-processor machines. Experiments are included that show the
method's performance on rigid loops, mobile loops, and multi-loop molecules.
In all cases, complete maps including all possible configurations are obtained,
thus allowing an exhaustive analysis and visualization of all pseudo-rotation
paths between different conformations satisfying loop closure.
|
- Links:
JCC paper,
Cuik II on Biomolecules
59 Seminar 13-12-2007- Speaker: José L. Albarral ()
- Title: Natural Landmark Detection for Visually-Guided Robot Navigation
- Abstract:
|
The main difficulty to attain fully autonomous robot navigation outdoors
is the fast detection of reliable visual references, and
their subsequent characterization as landmarks for immediate and
unambiguous recognition. Aimed at speed, our strategy has been to track
salient regions along image streams by just performing on-line pixel
sampling. Persistent regions are considered good candidates for
landmarks, which are then characterized by a set of subregions with
given color and normalized shape. They are stored in a database for
posterior recognition during the navigation process. Some experimental
results showing landmark-based navigation of the legged robot Lauron III
in an outdoor setting are provided.
|
- Links:
58 Seminar 22-11-2007- Speaker: Júlia Borràs ()
- Title: Flagged Parallel Manipulators
- Abstract:
|
Flagged parallel manipulators are a special kind of parallel robots with
nice kinematics and singularity properties.
This seminar will first do an overview of parallel robots and the
kinematic problems associated, talking about several mathematical tools
we use to model them.
Next, the study of flagged robots and their nice properties will be
presented, as well the stratification of their singularity loci and
geometric methods to generate a family of manipulators with the same
properties.
|
- Links:
57 Seminar 25-10-2007- Speaker: James L. Crowley
- Title: Perception of Human Activity for Augmented Environments
- Location: Exceptionally, this seminar will be at the FME assembly hall at 10:00 and not at the IRI meeting room at 12:00.
- Abstract:
|
In this presentation I will discuss the problem of augmenting ordinary
objects and environments with information and communication
technologies. I will begin with a presentation of projected interaction
in the PRIMA Augmented Meeting Environment at INRIA Rhones-Alpes. I will
present video demonstrations in which ordinary surfaces are augmented
with abilities for presentation and interaction using a steerable
camera-projector pair. I will then address the looming problem of
disruption created by the large-scale use of such technologies. I
present a possible solution to this problem that relies on providing
environments with an understanding of the activity and context of
activities. I will briefly describe a layered architecture for building
context aware services for augmented environments, finishing with an
example of an automated video acquisition systems for context aware
recording and transmission of meetings and lectures.
|
- Links: Home page
56 Seminar 11-10-2007- Speaker: Babette Dellen ()
- Title: Extraction of region correspondences via an n-d conjoint spin relaxation
process driving synchronous segmentation
of image sequences
- Abstract:
|
In this talk I will present a novel algorithm for the computation of
corresponding image regions of stereo pairs and motion sequences. In this
framework, local correspondences synchronize gray-level segmentation of
the image via an n-d conjoint spin relaxation process, which is based on
the method of superparamagnetic clustering of data. Spin interactions
result in the formation of clusters of correlated spins, providing an
automatic labeling of corresponding image regions. I will show results for
both synthetic and real image sequences, and suggest potential
applications of the algorithm.
|
- Links:
55 Seminar 27-9-2007- Speaker: Viorela Ila ()
- Title: Outdoor Delayed-State Visually Augmented Odometry
- Abstract:
|
This talk presents an efficient approach to outdoor visually
augmented odometry. The technique computes relative pose constraints via
a robust least squares minimisation of 3D point correspondences, which
are in turn obtained from the matching of SIFT features over two
consecutive image pairs. Pose constraints are then used to build a
history of pose estimates with and incremental delayed-state information
filter. The efficiency of the approach resides on the exact sparseness
of the delayed-state information form used. We also propose a loop
closure test in a SLAM context that checks both for closeness of means
and for highly informative updates at the same time.
|
- Links:
54 Seminar 14-6-2007- Speaker: Josep M. Mirats ()
- Title: Tensegrities
- Abstract:
|
Us parlarà de tensegrities, què són, perqué s'aguanten a l'espai, els
diferents punts de vista des d'els quals els podem analitzar per obtenir
les seves propietats de rigidés i estabilitat: moviments dels nodes,
forces que suporten els membres, energia de l'estructura. En aquest
repàs veurem l'estat de l'art, les aplicacions existents, el que hem
après d'aquestes estructures i el que ens falta per aprendre. Després
revisarem el que estem fent el grup de persones que hi treballem, així
com els objectius dels dos projectes que actualment hi ha en tensegrity.
|
- Links:
53 Seminar 7-6-2007- Speaker: Josep M Font ()
- Title: Dynamic mobile robot positioning from angular measurements using a two-step algorithm based on Kalman filtering
and triangulation
- Abstract:
|
The presented work focuses on mobile robot dynamic localization based on the angular measurements of the orientation, relative to the robot frame, of the straight lines between one of the robot points and artificial landmarks. The measurements are assumed to be done by means of a rotating laser scanner that detects the different landmarks. It is well-known that under robot static condition, geometric triangulation methods can be used to determine the robot pose from the measured angles.
However, when the robot moves the landmarks are detected at different vehicle configurations and therefore the geometric methods cannot be consistently used to determine the robot pose directly from the measurements. This problem, known in robotics as the dynamic positioning problem, has been widely studied in the past decades and solved by many authors using a pose-state Kalman filter. This algorithm fuses the robot positional odometry with each of the laser measurements to estimate the robot pose. In this work, an angular-state vector is considered for the Kalman filter in order to estimate the landmark angles. By using this algorithm, the evolution of each landmark angle between actual laser measurements is obtained, and then the triangulation methods can be consistently used at any time to calculate the robot pose.
The work presents computer simulations and real experiments using the robot SPHERIK-3x3, which has an omnidirectional kinematics (with 3 DOF) and is based on three directionally sliding wheels. The results obtained both in the simulations and the experiments, show that the developed method performs better in terms of positioning accuracy.
|
- Links: Web page
52 Seminar 31-5-2007- Speaker: Andreu Corominas ()
- Title: Active and Cooperative Map-based Global Localization for Mobile Robots in Large Environments
- Abstract:
|
In this talk an active and cooperative strategy to solve the map-based
global localization problem for autonomous mobile robots is presented.
Starting from a completely lost robot, common strategies such as particle
filtering or place recognition result in a finite number of position
hypotheses, specially in cases of large and real environments. For a fully
autonomous system, the robot has to decide moving somewhere in order to
disambiguate this set of hypotheses. Usually, places within the robot sensor
horizons can not disambiguate the set of hypotheses, therefore a technique
searching beyond them is required. This work presents a probabilistic
strategy that uses the map of the environment to evaluate candidate positions
in an exploration area around the robot. The strategy is neither sensor
dependent nor spatial representation dependent and is easily extensible to
multi-robot and sensor network contexts.
Finally, an implementation of the proposed strategy is discussed and some
simulation results in a real environment of 10000 m2 are shown validating the
presented approach.
|
- Links:
51 Seminar 17-5-2007- Speaker: Leonel Rozo ()
- Title: Haptic Devices and Applications
- Abstract:
|
Haptics devices have had a big evolution in the last ten years
and the number of different applications in Robotics has increased hugely.
This has caused many researchers to be concerned with the development of better tactile
and force feedback devices for supporting all areas where this kind of machines could be useful.
The goals of this seminar are to review the basic concepts about haptics, to show the
different kinds of haptic devices and their main features.
The Delta Haptic Device recently purchased by the institute will be introduced.
On other hand, the most important applications in Robotics will be explained.
Current projects about haptic rendering in virtual environments and haptic
feedback for Teleoperation tasks will be discussed in depth.
|
- Links:
50 Seminar 10-5-2007- Speaker: Juan A. Carretero ()
- Title: Parallel manipulator kinematics and other robotics-related research at the RaM Lab
- Abstract:
|
This presentation will serve as an overview of the research activities
conducted at the Robotics and Mechanisms Laboratory (RaM Lab) at the
University of New Brunswick (Canada). Current research work mainly
concentrates on two general areas: the study of parallel manipulators
and the simulation of robotic systems.
In the area or parallel manipulators, studies are being conducted on
kinematic and actuation redundancy in order to improve workspace
characteristics (e.g., workspace size and quality, force capabilities).
Additionally, studies involving the development of new kinematic
calibration methods for reduced degree-of-freedom parallel manipulators
are also under way. The new methods are being validated through a test
platform based on the 3-PRS parallel architecture.
In terms of the computer simulation of robotic systems, the current work
focuses on the development of a simulation environment for tethered
underwater vehicles. More particularly, new methods for determining the
separation distance and contact status between convex and/or concave
objects are currently being extended for flexible slender objects (e.g.,
ROV tether). Contact dynamics models for such objects have also been
developed and are being incorporated into realistic tethered vehicle
simulators.
|
- Links: Web page
49 Seminar 3-5-2007- Speaker: Vicente Ruiz de Angulo ()
- Title: Exploiting single-cycle symmetries in Branch-and-Prune algorithms
- Abstract:
|
Symmetries in discrete constraint satisfaction problems have been
explored and exploited in the last years, but symmetries in continuous
constraint problems have not received the same attention. Here we focus
on permutations of the variables consisting of one single cycle. We
propose a procedure that takes advantage of these symmetries by
interacting with a Branch-and-Prune algorithm without interfering with
it. A key concept in this procedure are the classes of symmetric boxes
formed by bisecting a n-dimensional cube at the same point in all
dimensions at the same time. We analyze these classes and quantify them
as a function of the cube dimensionality. Moreover, we propose a simple
algorithm to generate the representatives of all these classes for any
number of variables at very high rates. A problem example from the
chemical field and a kinematics solver are used to show the performance
of the approach in practice.
|
- Links:
48 Seminar 19-4-2007- Speaker: Guillem Alenyà ()
- Title: Depth from the visual motion of a planar target induced by zooming
- Abstract:
|
Robot egomotion can be estimated from an acquired video stream up to the
scale of the scene. To remove this uncertainty (and obtain true egomotion), a
distance within the scene needs to be known. If no a priori knowledge on the scene is
assumed, the usual solution is to derive ``in some way" the initial
distance from the camera to a target object. We propose a new, very simple way to
obtain such a distance, when a zooming camera is available and there is
a planar target in the scene. Similarly to ``two-grid calibration" algorithms, no
estimation of the camera parameters is required, and no assumption on the optical axis
stability between the different focal lengths is needed. Quite the
reverse, the non stability of the optical axis between the different focal lengths is
the key ingredient that enables to derive our depth estimate, by applying a
result in projective geometry. Experiments carried out on a mobile robot platform
show the promise of the approach.
|
- Links:
47 Seminar 22-3-2007 (Cancelled by the speaker)- Speaker: Federico Thomas ()
- Title:
- Abstract:
- Links:
46 Seminar 8-3-2007- Speaker: Juan Andrade-Cetto ()
- Title: A Wire-based Active Tracker
- Abstract:
|
Wire-based tracking devices are an affordable alternative to costly
tracking devices. They consist of a fixed base and a platform, attached
to the moving object, connected by six wires whose tension is maintained
along the tracked trajectory. One important shortcoming of this kind of
devices is that they are forced to operate in reduced workspaces so as
to avoid singular configurations. Singularities can be eliminated by
adding more wires but this causes more wire interferences, and a higher
force exerted on the moving object by the measuring device itself. In
this talk we show how, by introducing a rotating base, the number of
wires can be reduced to three, and singularities can be avoided by using
an active sensing strategy. This also permits reducing wire interference
problems and the pulling force exerted by the device.
|
- Links:
45 Seminar 28-2-2007- Speaker: Markus Klettner / José Antonio Casas
- Title: Our Answer to NASA's Beam Power Challenge
- Abstract:
|
The Spaceward Foundation manages NASA's annual beam power challenge that
will be taking place during the X Prize Cup in New Mexico.
Being the first contest of NASA's X-Prize inspired Centennial Challenges
Program the beam power challenge requires to design, build and operate a
climber, a machine just powered by a beam of light that can drive up and
down a tether ribbon, while carrying a payload.
Entries are rated according to the product of payload weight and climbing
speed, normalized by the net climber weight. This metric is representative
of the throughput of a space transportation system based on the Space
Elevator.
Our prototype climber will be composed by a panel of photovoltaic power
receptors that power a climb motor, all this assembled in a lightweight
aluminium structure. The traction mechanism is formed by wheels that gripe
the ribbon. The climber will need some power conditioning and control
circuits. These circuits control the climber speed and adjust the voltage
and current supplied by the solar cells to the traction motor and check the
bottom and top of the ribbon.
A very important part is the beam source system. This source has to be
concentrated and to be similar to the solar light, because the solar cells
that we will be employing are designed for this type of radiation. Hence we
will be using a Xenon bulb that matches sun light.
The climber design includes a super capacitor that will be storing part of
the energy supplied by the solar panel. The stored energy will allow to
keep climbing the ribbon in a steady and continuous manner, even without
light for a few seconds. In addition we are planning to use a Fresnel lens
to be able to better focus the beam of light at an increased distance from
the Xenon source, leading to improved power supply by the solar array at
higher altitudes of the climber.
At the moment the project is in its initial phase. We have got a prime
sponsor and have started assembling the basic parts of the prototype.
|
- Links: Introduction, Web page
44 Seminar 7-2-2007- Speaker: Ales Ude ()
- Title: Learning object representations by manipulation
- Abstract:
|
In the first part of my talk I will briefly present our previous work on
transferring human movements to humanoid robot movements, learning from
observations using primitives, and on foveated vision and object
recognition. In the second part I shall present our current work on
building object representations by manipulation. I will focus on how to
exploit a humanoid robot's motor capabilities to learn representations
of objects without having any prior information about them. We will show
that by taking control of the object the humanoid can resolve the
problems arising in systems that rely on purely bottom-up attention and
segmentation, which enables the robot to acquire appearance models
suitable for recognition.
|
- Links: Home page
43 Seminar 25-1-2007- Speaker: Sergi Hernàndez ()
- Title: Tensegrity form-finding method based on non-linear programming
- Abstract:
|
Tensegrity structures are pre-stressable truss-like
systems which mantain their form due to an intrincate balance of forces
between a disjoint set of rigid elements (bars) and a continuous set of
tensile elements (cables). One of the fundamental problems of such
structures is, given a description of the elements of the structure
(cables or bars) and their topological relationship, find a stable
configuration. This process implies both geometric and static
constraints, and has received a lot of attention since this kind of
structures were introduced. In this talk we propose a form-finding
method based on non-linear programming which takes into account both
geometric and static constraints and is shown to converge always to a
valid solution (if it exists). The problem is solved in a higher
dimensional space to speed up the convergence.
|
- Links: Slides
42 Seminar 14-12-2006- Speaker: Carlos Albores ()
- Title: Accurate position uncertainty estimation and propagation for Autonomous Vehicles
- Abstract:
|
When a robot has to solve a task in a unconstrained general environment
it is required to know both, its position, and the uncertainty for this
position estimate. It is usual to express this uncertainty by means of a
covariance matrix. In a previous work we presented a method to obtain a
close form expression for the uncertainty in the odometry position
estimate of a mobile vehicle using a covariance matrix whose form is
derived from the kinematic model. We then particularize for a
non-holonomic Ackerman driving type autonomous vehicle. Its kinematic
model relates the two measures being obtained for internal sensors: the
velocity, translated into the instantaneous displacement, and the
instantaneous steering angle. However, obtaining a close form expression
for the cross-covariance terms between the previous position of the
robot and its actual increment of position is not straight forward.
Thus, a formulation to obtain a close form expression for these terms is
developed. The basic idea of the method herein presented is to fit the
covariance matrix for the previous position using a set of equations
that, at the same time, simplifies its mathematical expression. A Monte
Carlo simulation is performed in order to compare the obtained position
uncertainty with the presented method and others used to estimate and
propagate the errors, such as the classical Jacobian and the scaled
unscented transformation.
|
- Links:
41 Seminar 23-11-2006- Speaker: Erika Ottaviano ()
- Title: LARM Research Activities on Cable-Based Parallel Manipulators
- Abstract:
|
In this presentation research activities are discussed, which have been developed at LARM: Laboratory of Robotics and Mechatronics, University of Cassino. After a brief introduction on teaching and research issues developed at LARM, specific attention is addressed to both passive and active cable-based parallel manipulators. In particular, passive cable robots can refer to measuring systems, while active cable-based parallel manipulators are actively actuated. Prototypes and experiences are described as concerning with CATRASYS (Cassino Tracking System), a pose estimation device, and CALOWI (Cassino Low-Cost easy-Operation Wire Robot), a 4-4 cable-suspended manipulator. Further applications are discussed together with those referring to current collaboration between LARM and IRI.
|
- Links: LARM web page
40 Seminar 9-11-2006- Speaker: Oscar Serra ()
- Title: Hierarchical Models for Object Recognition
- Abstract:
|
Although the original idea is not new (Neocognitron - Fukushima - 1991),
recent neurophysiological findings in the visual cortex have helped to
come up with a model capable of interesting invariant capabilities, that
competes with some of the best state-of-the-art computer vision systems.
The so called standard model was fistly implemented in the MIT (Serre,
Wolf and Poggio - 2005) and recently improved (August 2006). The
Hierarchical Model progressively processes the visual information
through several levels, that need the output of the previous ones to
proceed, and are organized hierarchically. It is still unclear, however,
which bio-inspired principles are best in computer vision systems; so
the objective of the talk will be to present a basic model and to
discuss possible changes.
|
- Links:
39 Seminar 26-10-2006- Speaker: Jorge Scandaliaris ()
- Title: Color Edges and Photometric Invariants
- Abstract:
|
I will expose the ideas behind a couple of works where photometric invariants are used to detect or classify color edges. The first work uses two interesting ideas to classify the physical nature of edges: an automatic noise-adaptive local thresholding; and a taxonomy on color-edge types based on the properties of different color models. The second work proposes a set of quasi-invariants based on derivatives that have good discriminative power and are robust againts noise.
|
- Links:
38 Seminar 5-10-2006- Speaker: Enric Celaya ()
- Title: Interval propagation for the determination of feasible linkage configurations
- Abstract:
|
In this talk I will present an interval propagation algorithm for
variables in planar and spherical single-loop linkages. Given an
interval constraining the allowed values for an input variable, the
propagation algorithm finds the set of values for an output variable for
which there is at least one solution of the loop equation satisfying the
constraint.
A recent extension of the propagation algorithm allows the propagation
of multiple constraints imposed on different variables at the same time.
This provides a powerful tool to find the solution sets of complex
multi-loop linkages by iterative methods.
|
- Links:
37 Seminar 21-9-2006- Speaker: Josep M. Porta ()
- Title: Multi-loop Position Analysis via Iterated Linear Programming
- Abstract:
|
In this talk we will present a numerical method able to isolate all configurations
that an arbitrary loop linkage can adopt, within given ranges for its
degrees of freedom. The procedure is general, in the sense that it can be
applied to single or multiple intermingled loops of arbitrary topology, and
complete, in the sense that all possible solutions get accurately
bounded, irrespectively of whether the analyzed linkage is rigid or mobile. The
problem is tackled by formulating a system of linear, parabolic, and hyperbolic
equations, which is here solved by a new strategy exploiting its structure. The
method is conceptually simple, geometric in nature, and easy to implement, yet it
provides solutions at the desired accuracy in short computation times.
|
- Links: RSS06 paper
36 Seminar 14-7-2006- Speaker: Teresa Vidal ()
- Title: Observability Analysis of Bearing-Only SLAM Systems
- Abstract:
|
In this talk we present an observability analysis for a number of single
camera SLAM systems. The aim is to get a better understanding of the
well known intuitive behaviour of these systems, such as the need for
triangulation to features from different positions in order to get
accurate relative pose estimates. The characterization of the
unobservable directions is made using the nullspace basis of the
stripped observability matrix. This allow us to identify the type of
inputs that should be avoided in order not to incur in unobservable
conditions. The analysis is performed modeling the systems in the
continous time domain as piecewise linear.
|
- Links:
35 Seminar 30-6-2006 (Cancelled by the speaker)- Speaker: Alberto Sanfeliu ()
- Title:
- Abstract:
- Links:
34 Seminar 22-6-2006- Speaker: José del Rocio Millan ()
- Title: Brain-Controlled Robots
- Abstract:
|
The idea of moving robots or prosthetic devices not by manual control,
but by mere thinking (i.e., the brain activity of human subjects) has
fascinated researchers for the last 30 years, but it is only now that
first experiments have shown the possibility to do so. Such a kind of
brain-computer interface (BCI) is a natural way to augment human
capabilities by providing a new interaction link with the outside world
and is particularly relevant as an aid for physically disabled people.
In this talk I will review the field of BCI, with a focus on how
brainwaves can be used to directly control robots. Most of the hope for
such a possibility comes from invasive approaches that provide detailed
single neuron activity; however, it requires surgical implantation of
microelectrodes in the brain. For humans, non-invasive systems based on
electroencephalogram (EEG) signals are preferable but, until now, have
been considered too poor and slow for controlling rapid and complex
sequences of movements. Recently we have shown for the first time that
online analysis of a few EEG channels, if used in combination with
advanced robotics and machine learning techniques, is sufficient for
humans to continuously control a mobile robot.
|
- Links:
33 Seminar 15-6-2006 - Speaker: Guillem Alenyà ()
- Title: Anàlisi estadístic de la propagació de l'error en estimar el
moviment 3D a partir d'imatges
- Abstract:
|
S'analitza la precisió d'un métode per estimar com es belluga una
cámera a
partir de les imatges que va captant. D'una vista a una altra es
produeix una
transformació afí del pla de la imatge caracteritzada per 6 parámetres, a
partir dels quals es calcula la translació i la rotació de la cámera.
Mitjançant
simulacions de Monte Carlo es valida l'aplicabilitat d'un procediment
estadístic menys costós, la Unscented Transformation, que permet
obtenir les
mitjanes i covariances del moviment 3D aplicant el mètode només a 13
mostres per vista.
Els resultats indiquen que les translacions i la rotació en el pla de la
imatge
es recuperen millor que la translació segons l'eix òptic, que a la seva
vegada
supera les dues rotacions fora del pla. Quant a les covariances, només
apareix
un cert lligam entre els tres graus de llibertat menys precisos.
|
- Links:
32 Seminar 25-5-2006- Speaker: Jordi Cornella ()
- Title: Geometrical Approaches for Optimal Grasps Synthesis
- Abstract:
|
Grasping and manipulation of objects are fundamental tasks in the use of robots in industrial processes as well as in robotized applications in non-structures environments. The development of versatile end-effectors, like the mechanical hands, has the intention of widening the field of robot applications as well as the efficiency of the robots, but, in contrast, the kinematics and control complexity of these devices and the constraints on the grasping action make it necessary the use of systems that automatically solve the different problems associated with a grasping operation.
This talk presents some approaches developed in my thesis to solve two problems involved in grasping and manipulation of objects by means of mechanical hands: the determination of the contact points between the fingers and the object that assure the object immobility, and the determination of the contact forces that each finger has to exert in order to maintain the object equilibrium. In general, these problems can have multiple solutions, some of them being more adequate than others for a given purpose. Then, the objective of the proposed approaches is the determination of the final solution taking into account quality criteria, namely, the robustness of the grasp in front of external perturbations forces and finger positioning errors in the determination of the contact points, and the minimization of the contact forces.
|
- Links: IOC web page
31 Seminar 10-5-2006- Speaker: Alberto Sanfeliu (),
Federico Thomas (),
Carme Torras ()
- Title: Strep projects seminar
- Abstract:
|
This special seminar will be a brief introduction to the three STREP project
proposals in which the IRI robotics group is involved. The three STREP
proposlas are:
URUS: Ubiquitous Robotics in Urban Setting (Alberto Sanfeliu) MARIONET: Wire-driven parallel robot for human being servicing (Federico Thomas) AIR: Advanced Interactive Robotics (Carme Torras)
|
- Links:
30 Seminar 4-5-2006- Speaker: Florentin Woergoetter ()
- Title: Temporal Sequence Learning in Neurons and Robots
- Abstract:
|
Biological agents can in a very flexbile way adapt to their
environment and this is achieved by changing the properties of large
networks of neurons through synaptic plasticity following learning.
Principles of synaptic plasticity have been used in technical fields in
conjunction with the design of artificial neural networks (ANNs), but
examples where neural networks are actually controlling complex robots
are still quite rare. The conflict between the required reliablility in
robot control and the more fuzzy and distributed responses of neuronal
controllers makes it hard to use ANNs for achieving robust behavior.
Here we show that one can design a synaptic learning rule at the single
unit level, implement this into individual neurons, which already
control simple actions, and finally design a more complex 24-unit
neuronal controller to generate robust and adaptable gaits in a planar
biped walking robot.
|
- Links:
29 Seminar 20-4-2006- Speaker: Tom Creemers ()
- Title: Computation of Planar Linkage Configurations - Algorithm &
Software Architecture
- Abstract:
|
In this talk we will introduce a suite of algorithms to deal with planar
linkage configuration spaces.
The kernel of this suite is a numerical method able to compute all possible configurations
of a planar linkage. The procedure is applicable to rigid linkages (i.e., those
that can only adopt a finite number of isolated configurations) and to mobile ones
(i.e., those that have internal degrees of freedom). The method is based on the
fact that this analysis always reduces to finding the roots of a polynomial system
of linear, quadratic, and hyperbolic equations, which is here tackled with a new
strategy exploiting its structure. The method is conceptually simple, geometric in
nature, and easy to implement, yet it provides solutions of the desired accuracy
in short computation times. Experiments are included which show its performance on
the double butterfly linkage, for which an accurate an complete discretization of
its configuration space is obtained.
|
- Links: ICRA06
28 Seminar 30-3-2006 (Cancelled by the speaker)- Speaker: Jorge Scandaliaris ()
- Title:
- Abstract:
- Links:
27 Seminar 23-3-2006- Speaker: Viorela Ila ()
- Title: VLSI Architecture for Motion Estimation in Underwater Imaging
- Abstract:
|
This seminar introduces the main topics developed in my thesis integrating knowledge from several fields such as underwater robotics, computer vision, VLSI architectures and reconfigurable devices. Underwater robotics was the motivation of this work, even though computer vision and parallel VLSI architectures played the most important role. Many technologies exist to provide information about a vehicle position, but among them vision based systems represent a good option due to their low cost, high-rate and high-resolution. From the relative observation of the seafloor, a vision system can estimate the vehicle's motion. While moving, the robot can build a map of the seafloor. These visual maps are known as mosaics and can be used for the localisation of the vehicle. The apparent motion of a camera mounted on an underwater vehicle can be estimated by correlating two successive frames of an image sequence. However, searching for correspondences is a time-consuming and error-prone process. Lack of well-defined contours caused by blurring of the elements of the image, as well as non-uniform illumination when using artificial light makes underwater scenes much more difficult to be processed than normal images. Therefore, methods frequently used in standard image processing must be modified and adapted to these particular conditions. We proposed in this thesis a method based on texture characterisation of points to reject outliers from the image correspondence problem. On the other hand, a parallel implementation was used to speed-up parts of the motion estimation algorithm which have a computationally high load. A new VLSI architecture is proposed with the aim of achieving frame-rate performance.
|
- Links: Home Page
26 Seminar 16-3-2006- Speaker: José L. Albarral ()
- Title: Color Segmentation of Natural Landmarks for Outdoor Robotic Vision
- Abstract:
|
Our research pursuits the autonomous navigation of mobile robots in outdoor environments. In these environments the robot is going to rely on the detection, characterization and later recognition of natural landmarks for orientation and localization purposes. In this context, a color based image segmentation algorithm has been designed to extract the most relevant regions composing a natural landmark. Then, the spatial moments and the topological relations of the extracted regions are used together with their color information for the characterization of the landmark.
Our image segmentation strategy combines the color discrimination capabilities of histograms with the spatial capabilities of region growing methods and works in the HSI color space for its robustness to changing illumination conditions. But the color discrimination is not uniform in any of its hue, saturation or intensity domains. Therefore, we have modelled those heterogeneous discrimination properties in order to obtain a uniform color distance measure that provides proper segmentation results. The result is a fast and robust color segmentation algorithm suitable for our robotic navigation system.
|
- Links:
25 Seminar 23-2-2006- Speaker: Alejandro Agostini ()
- Title: Reinforcement learning for complex tasks with efficient generalization
- Abstract:
|
In applications where an agent is required to develop a complex task it is
hard to code which action must be executed in each situation. It is simpler to
make the agent learn to execute the task autonomously, interacting with the
environment and learning by the experience. This learning paradigm is denoted
as reinforcement learning (RL). The main difficulty of RL is the vast number
of different situations the agent should experience in a complex task, making
the straight application of this paradigm impracticable in many problems. To
make it feasible the agent must be supplied with the capability to generalize
from the experienced situations in order to infer which action to execute in
those situations never perceived. The same generalization problem is raised in
many fields of AI, where some inference is required in problems where the
amount of information is computationally intractable. Therefore, many of the
generalization techniques applied in RL are the same as those applied in other
learning paradigms, mainly in supervised learning. These techniques still have
problems when generalizing in complex tasks, constituting an open research
area.
Our work consists in finding a generalization technique that improves the
results obtained so far, and develop a method that combines this technique
with RL for an agent to learn complex tasks in real environments. One of the
main assumptions in our research is that each variable the agent must perceive
to complete a task has different relevancies for the inference depending on
the situation, where a situation not only consists of perceptions but also
implicates actions. Current generalization techniques assume that a variable
has the same relevance for all the situations the agent could face wasting
opportunities of generalization. The most relevant perceived variables for a
situation, with the coupled actions, are gathered in a rule. In order to
create a structure that supports the rules system, where some variables should
be considered for some situations and not for others, we developed a function
representation that consists in overlapped subspaces of the domain. Each
subspace has assigned a value of the represented function (in our case, the
cumulative reward q). Given a particular instance (a situation) many
overlapped subspaces are involved and only one of them determines the value of
the function. This is done after a competition among the involved subspaces
where the subspace that wins determines the value of the function.
The developed technique progressively builds and embeds rules in the mentioned
representation, solving the arising representation inconsistencies while
learning the value function. These rules finally contain the relevant
information to optimally complete the task. The developed technique so far
finds a consistent function representation, deals with the inherent
uncertainties of the real environment by using estimation theory, and is
robust to nonstationarities of the system as required by the RL.
|
- Links:
24 Seminar 9-2-2006- Speaker: Josep M Porta ()
- Title: Robot Planning in Partially Observable Continuous Domains
- Abstract:
|
In this talk I will describe a value iteration algorithm for learning to act in Partially
Observable Markov Decision Processes (POMDPs) with continuous state
spaces. Mainstream POMDP research focuses on the discrete case and this
complicates its application to, e.g., robotic problems that are naturally
modeled using continuous state spaces. The main difficulty in defining
a (belief-based) POMDP in a continuous state space is that expected
values over states must be defined using integrals that, in general,
cannot be computed in closed form. We will first
see that the optimal finite-horizon value function over the continuous
infinite-dimensional POMDP belief space is piecewise linear and convex,
and is defined by a finite set of supporting functions that are
analogous to the vectors (hyperplanes) defining the value function
of a discrete-state POMDP. Second, we will see that, for a fairly general
class of POMDP models in which all functions of interest are modeled
by Gaussian mixtures, all belief updates and value iteration backups
can be carried out analytically and exact. A crucial difference with
respect to the vectors of the discrete case is that, in the
continuous case, the functions will typically grow in
complexity (e.g., in the number of components) in each value iteration.
Finally, I will describe the application of Perseus, a randomized
point-based value iteration algorithm, in a simple robot planning
problem with a continuous domain.
|
- Links: RSS'05 paper
23 Seminar 15-12-2005 (Cancelled by the speaker)- Speaker: Oscar Serra ()
- Title:
- Abstract:
- Links:
22 Seminar 1-12-2005- Speaker: Carme Torras ()
- Title: Robots adaptatius: projectes passats i futurs
- Abstract:
|
La presentació constarà de dues parts: primer descriuré alguns dels resultats
obtinguts a l'IRI en l'aplicació de xarxes neuronals a l'aprenentatge de la
cinemàtica i la coordinació visuomotora de robots, i després esbossaré les
línies directrius del projecte "Perception, Action and Cognition through
Learning of Object-Action Complexes", aprovat dins del 6è Programa Marc de la
Comissió Europea i que començarà el proper febrer.
|
- Links: Related paper
21 Seminar 24-11-2005- Speaker: Teresa Vidal ()
- Title: Active Control for Single Camera SLAM
- Abstract:
|
We consider a single hand-held camera
performing SLAM at video rate with generic 6DOF motion. The
aim is to optimise both the localisation of the sensor and building
of the feature map by computing the most appropriate control
actions or movements. The actions belong to a discrete set (e.g.
go forward, go left, go up, turn right, etc), and are chosen so as to
maximise the mutual information gain between posterior states
and measurements. Maximising the mutual information helps
the camera avoid making ill-conditioned measurements appropriate
to bearing-only SLAM. Moreover, orientation changes are
determined by maximising the trace of the Fisher Information
Matrix. In this way, we allow the camera to continue looking
at those landmarks with large uncertainty, but from betterposed
directions. Various position and gaze control strategies are
first tested in a simulated environment, and then validated in a
video-rate implementation. Given that our system is capable of
producing motion commands for a real-time 6DOF visual SLAM,
it could be used with any type of mobile platform, without the
need of other sensors.
|
- Links:
20 Seminar 17-11-2005- Speaker: Pablo Riera ()
- Title: A MatLab Toolbox for Solving the Kinematics of Planar Mechanisms
- Abstract:
|
We have developed a suite of MatLab scripts for solving the Input/Output
problem of planar mechanisms. The mechanism is described in a matrix that
is given to the toolbox as input. The toolbox extracts the
loop-closure equations and finds all isolated roots of the equation
system by polynomial continuation homotopy. Then all the possible
configurations of the mechanisms are drawn.
|
- Links:
19 Seminar 10-11-2005- Speaker: Michael Villamizar ()
- Title: An Object Detection System
- Abstract:
|
We will describe a system to detect objects on images that
is invariant to translations, scaling and rotations of the object, moreover
it presents a low computational cost and high detection rates.
The system is based on local features to detect contours that are
combined with the AdaBoost Algorithm to obtain a robust classifier able to
detect the object in different contexts.
|
- Links:
18 Seminar 4-11-2005 (at 10:30)- Speaker: Nikolay Ivanov ()
- Title: One Approach to the Development of Parallel Computing Machine
- Abstract:
|
This work discusses some aspects of the process of developing of parallel computing machine. The mathematical concept "algebra" is used as a basis of the investigation,. The application of this notion allows the representation of any task of this type as an ordered structure of three components: set of elements (Xilinx's FPGA), set of rules for action (concrete, particular algorithm), and set of constraints. It is shown that such an approach cover in practice the complete set of all valuable varieties of the problem and permits to find the optimal solution for every particular task.
|
- Links:
17 Seminar 2-11-2005 (at 10:30) (We have two visitors from the Institute of Information Technologies, Bulgarian Academy of Science
that will give us two talks, one on Wednesday and one on Friday)- Speaker: Georgi Gluhchev ()
- Title: Automatic Line Detection
- Abstract:
|
An approach is described aimed at the detection of lines in digital images and evaluation of metric parameters of the objects. It is based on the properties of the Fourier Transform which allow accumulating energy of pixels lying on straight lines of same slope alongside a single straight line in the frequency domain. Using only the spectrum values alongside the latter line permits the detection of straight line segments in the original image and the evaluation of specific parameters. This technique also allows detecting characteristic points like corner points, points of intersection or bifurcation, thus describing the original image as a set of geometric features.
The approach could be applied to the problems of document processing, robot vision and like.
|
- Links:
16 Seminar 20-10-2005- Speaker: Gorka Bonals ()
- Title: A probabilistic path planner for two 6R manipulators simultaneously grasping an object
- Abstract:
|
We present a probabilistic path planning method which computes
collision-free paths for two robotic arms Staübli RX60 that simultaneously
grasp an object. The method assumes that the environment is static and that
accurate geometric models of their objects are known. It proceeds in two
phases: a learning phase and a query phase. In the learning phase, a
probabilistic roadmap is constructed and stored as a graph whose nodes
correspond to collision-free configurations and whose edges correspond to
feasible paths between these configurations. These paths are computed using
a simple and fast local planner. In the query phase, any given start and
goal configurations of the two robotic arms are connected to two nodes of
the roadmap, and the roadmap is then searched for a path joining them. The
method is an adaptation of the well-known algorithm by Svetska et al. ,
which has been appropriately modified so as to take into account the closure
constraint imposed by the simultaneous grasp of the object.
|
- Links:
15 Extra Seminar 13-10-2005- Speaker: Joan Solà, visitor from LAAS ()
- Title: Delayed and Undelayed methods for Bearing Only SLAM
- Abstract:
|
Most solutions to the SLAM problem in robotics have utilized Range and
Bearing sensors as the provided perception data is easy to
incorporate, allowing immediate landmark initialization. This is not
the case when using Bearing-Only information because the distance to
the perceived landmarks is not directly provided. A whole estimate of
a landmark position will only be possible via a set of measurements
taken from different points of view.
The vast majority of contributions to this problem perform a parallel
task to get this estimate, and hence the landmark initialization is
delayed. However, a second family of methods exist that map the
bearing information of the landmark without the need of knowing its
distance. Pros and cons of both delayed and undelayed families will be
discussed, as well as today's most performing algorithms for each one
of them in the EKF-SLAM framework.
Pros and cons for vision-based SLAM systems can be resumed as follows:
a) delayed methods are more optimal than undelayed ones, in the senses
of information loss and consistency; b) only undelayed methods can be
used in vehicles that have the vision sensors looking in the motion
direction; and c) delayed methods can more easily deal with unstable
or short living detected visual features.
The boost in algorithm performance is mainly based on the following
hints: a) non-Gaussian PDFs of the unobserved distance to the
landmarks are approximated by Gaussian mixtures instead of sets of
particles; b) these Gaussian mixtures are best defined as geometric
series of Gaussians; c) for the delayed method, several landmarks are
tracked at each frame and only the best ones will be initialized; and
d) for the undelayed method, the Federated Information Sharing filter
updating technique is developed and used. The consequence of these
choices is the possibility to simultaneously initialize several
landmarks in real time, with both the delayed and undelayed
algorithms.
Some experimental results are given to show the pertinence of the
proposed methods.
|
- Links: IROS2005a,
IROS2005b,
Video
14 Seminar 6-10-2005- Speaker: Francesc Moreno ()
- Title: Multiple Cue Integration for Robust Tracking in Dynamic Environments: Application to Video Relighting
- Note: This seminar will be PhD thesis presentation rehearsal so expect it to be longer that usual seminars.
Consequently, this seminar will start at 11:00 instead of at 12:00.
- Abstract:
|
Motion analysis and object tracking has been one of the principal focus of attention over the past two decades within the computer vision community. The interest of this research area lies in its wide range of applicability, extending from autonomous vehicle and robot navigation tasks, to entertainment and virtual reality applications.
Even though impressive results have been obtained in specific problems, object tracking is still an open problem, since available methods are prone to be sensitive to several artifacts and non-stationary environment conditions, such as unpredictable target movements, gradual or abrupt changes of illumination, proximity of similar objects or cluttered backgrounds. Multiple cue integration has been proved to enhance the robustness of the tracking algorithms in front of such disturbances. In recent years, due to the increasing power of the computers, there has been a significant interest in building complex tracking systems which simultaneously consider multiple cues. However, most of these algorithms are based on heuristics and ad-hoc rules formulated for specific applications, making impossible to extrapolate them to new environment conditions.
In this dissertation we propose a general probabilistic framework to integrate as many object features as necessary, permitting them to mutually interact in order to obtain a precise estimation of its state, and thus, a precise estimate of the target position. This framework is utilized to design a tracking algorithm, which is validated on several video sequences involving abrupt position and illumination changes, target camouflaging and non-rigid deformations. Among the utilized features to represent the target, it is important to point out the use of a robust parameterization of the target color in an object dependent colorspace which allows to distinguish the object from the background more clearly than other colorspaces commonly used in the literature.
In the last part of the dissertation, we design an approach for relighting static and moving scenes with unknown geometry. The relighting is performed through an `image-based' methodology, where the rendering under new lighting conditions is achieved by linear combinations of a set of pre-acquired reference images of the scene illuminated by known light patterns. Since the placement and brightness of the light sources composing such light patterns can be controlled, it is natural to ask: what is the optimal way to illuminate the scene to reduce the number of reference images that are needed? We show that the best way to light the scene (i.e., the way that minimizes the number of reference images) is not using a sequence of single, compact light sources as is most commonly done, but rather to use a sequence of lighting patterns as given by an object-dependent lighting basis. It is important to note that when relighting video sequences, consecutive images need to be aligned with respect to a common coordinate frame. However, since each frame is generated by a different light pattern illuminating the scene, abrupt illumination changes between consecutive reference images are produced. Under these circumstances, the tracking framework designed in this dissertation plays a central role. Finally, we present several relighting results on real video sequences of moving objects, moving faces, and scenes containing both. In each case, although a single video clip was captured, we are able to relight again and again, controlling the lighting direction, extent, and color.
|
- Links:
13 Seminar 29-9-2005- Speaker: Pablo Jimenez ()
- Title: Robots and Space Exploration (II)
- Abstract:
|
The hostile conditions existing beyond the Earth's atmosphere
convert space missions into one of the most well-founded applications
of robots but also into one of the most challenging ones. A survey on
the two big families of space robots is presented here: robotic arms
for EVA operations (and their "natural" extension: humanoids), and rovers
for planetary exploration (highly popular due the success of the last Mars
missions). The talk will conclude with some new robotic concepts
that cannot be classified into these categories.
|
- Links:
12 Seminar 22-9-2005- Speaker: Pablo Jimenez ()
- Title: Robots and Space Exploration (I)
- Abstract:
|
The hostile conditions existing beyond the Earth's atmosphere
convert space missions into one of the most well-founded applications
of robots but also into one of the most challenging ones. A survey on
the two big families of space robots is presented here: robotic arms
for EVA operations (and their "natural" extension: humanoids), and rovers
for planetary exploration (highly popular due the success of the last Mars
missions). The talk will conclude with some new robotic concepts
that cannot be classified into these categories.
|
- Links:
11 Seminar 8-9-2005- Speaker: Sergi Hernàndez ()
- Title: Unknown contour recovery using force and position feedback
- Abstract:
|
In some applications, it is useful to retrieve the shape of a
surface using a robot manipulator. Usually, this goal is achieved
using the encoder data obtained while the robot is following the surface
using a hybrid position/force or speed/force control. However,
nonlinearities associated with the actuators such as backlash make
impossible to get the real contour from the encoder data. To solve this
problem, an external position feedback is added. This new feedback loop is based
on a PSD (Position Sensing Device) sensor which presents some advantages
over a traditional CCD camera such as speed an accuracy. Some
experimental results are presented using a 3 dof manipulator following a 2D contour.
|
- Links:
10 Seminar 21-7-2005 (Cancelled by the speaker) - Speaker: Jorge Scandaliaris ()
- Title:
- Abstract:
- Links:
9 Seminar 7-7-2005- Speaker: Enric Celaya ()
- Title: A flexible platform for vision-based robot navigation
- Abstract:
|
A user interface for the control of vision-based robot navigation in
previously unknown, indoor or outdoor environments will be described.
The user, by means of a visual feedback from the camera(s) of the robot,
can select a visual target to be reached by the robot and launch an
autonomous navigation process. Manual control can be taken back by the
user at any time. The interface is built as a modular platform, capable
of accommodating different types of robots and different algorithms for
vision and navigation. Thus, in addition to constitute a generic
interface for navigation control, the platform can be used as a tool to
test different navigation approaches and compare their performances in
similar contexts.
|
- Links:
8 Seminar 23-6-2005 (Delayed to 1-7-2005)- Speaker: Federico Thomas ()
- Title: Moment-Preserving Image Approximations
- Abstract:
|
An image can be seen as an element of a vector space and hence it
can be expressed in as a linear combination of the elements of any
non necessarily orthogonal basis of this space. After giving a
matrix formulation of this well-known fact, this paper presents a
reconstruction method of an image from its moments that sheds new
light on this inverse problem. Two main contributions are
presented: (a) the results using the standard approach based on
the least squares approximation of the result using orthogonal
polynomials can also be obtained using matrix pseudoinverses,
which implies higher control on the numerical stability of the
problem; and (b) it is possible to use basis functions in the
reconstruction different from orthogonal polynomials, such as
Fourier or Haar basis, allowing to introduce constraints relative
to the bandwidth or the spatial resolution on the image to be
reconstructed.
|
- Links:
7 Seminar 9-6-2005- Speaker: Josep M Mirats ()
- Title: A Closed Form Expression for the Uncertainty in Odometry Position Estimate of an Autonomous Vehicle
- Abstract:
|
Using internal and external sensors to provide position estimates in a
two-dimensional space is necessary to solve the localization and
navigation problems for a robot or an autonomous vehicle. Usually, a
unique source of position information is not enough so researchers try
to fuse data from different sensors using several methods as for example
Kalman filtering. Those methods need an estimation of the uncertainty in
the position estimates obtained from the sensory system. This
uncertainty is expressed by a covariance matrix, which is usually
obtained from experimental data assuming, by the nature of this matrix,
general and unconstrained motion. We propose in this paper a close form
expression for the uncertainty in the odometry position estimate of a
mobile vehicle using a covariance matrix whose form is derived from the
cinematic model. We then particularize for a non-holonomic Ackerman
driving type autonomous vehicle. Its cinematic model relates the two
measures being obtained for internal sensors: the velocity, translated
into the instantaneous displacement, and the instantaneous steering
angle. The proposed method is validated experimentally, and compared
against Kalman filtering.
|
- Links:
6 Seminar 26-5-2005- Speaker: Lluís Ros ()
- Title: Wrenchpad - A force sensitive tablet
- Abstract:
|
This seminar presents a force and torque sensor developed within the
project "Multi-arm roboticed cell" ("Estació de treball multibraçs"),
funded by the CERTAP, a reference center of the Generalitat de
Catalunya, the Catalan government. The sensor has the structure of a
Stewart-Gough platform: it is made of two rigid plates, a base and a
platform, linked by six legs, each mounting a single-axis load-cell to
measure the force on it. We will see how the measures of the six legs
can be combined to derive 1) the net wrench (force and torque) acting
on the platform, 2) the line of application of the force, and 3) the
uncertainties associated with all these magnitudes due to errors in
the measured loads. The device is available in our lab for anyone
wishing to play with it (just contact any of the authors).
The work presented in this seminar has been done in cooperation with
Roger Frigola, Francesc Roure, and Federico Thomas.
|
- Links:
ICRA paper
5 Seminar 12-5-2005- Speaker: Guillem Alenyà ()
- Title: Recovering Epipolar Direction from Two Affine Views of a Planar Object
- Abstract:
|
Most approaches to camera motion estimation from image sequences require
matching the projections of at least 4 non-coplanar points in the scene.
The case of points lying on a plane has only recently been addressed,
using mainly projective cameras. We here study what can be recovered
from two uncalibrated views of a planar object under affine viewing
conditions. Using results in projective geometry, we prove that the
affine epipolar direction can be recovered provided camera motion is
free of cyclorotation. This result is then confirmed analytically, and
subjected to experimentation. A setup consisting of a Staubli robot
holding a planar object in front of a camera is used to obtain
calibrated image streams. The object contour is tracked and its affine
deformation between any two frames extracted. The fact that our method
and the Gold Standard algorithm produce comparable results shows the
potential of our proposal, since with less information (only from a
plane) and with a much simpler processing (solving a single second-order
equation), we obtain the epipolar direction with similar accuracy.
|
- Links:
4 Seminar 28-4-2005- Speaker: Juan Andrade-Cetto ()
- Title: Unscented Transformation of Vehicle States in SLAM
- Abstract:
|
In this article we propose an algorithm to reduce the effects caused by
linearization in the typical EKF approach to SLAM. The technique
consists in computing the vehicle prior using an Unscented
Transformation. The UT allows a better nonlinear mean and variance
estimation than the EKF. There is no need however in using the UT for
the entire vehicle-map state, given the linearity in the map part of the
model. By applying the UT only to the vehicle states we get more
accurate covariance estimates. The a posteriori estimation is made using
a fully observable EKF step, thus preserving the same computational
complexity as the EKF with sequential innovation. Experiments over a
standard SLAM data set show the behavior of the algorithm.
|
- Links:
ICRA-05-paper,
ICRA-05-slides
3 Seminar 14-4-2005- Speaker: Josep M Porta ()
- Title: On the Trilaterable Six-Degree-of-Freedom Parallel and
Serial Manipulators
- Abstract:
|
The inverse/direct kinematics of trilaterable serial/parallel
manipulators can be stated as a system of distance constraints
whose set of solutions can be determined using a sequence of
trilaterations, possibly involving points at infinity. It is
possible to decide whether a mechanism is trilaterable by relying
only on its topology. Based on this fact, we here enumerate all
trilaterable serial and in-parallel robots with six degrees of
freedom. The relevance of the obtained family of manipulators is
established when it is shown to contain the best-known commercial
serial robots. As a result of this analysis, we come up with a
general method to solve the inverse/direct kinematics of a wide
family of manipulators.
|
- Links: ICRA-05-paper,
ICRA-05-slides
2 Seminar 31-3-2005 (Delayed to 7-4-2005)- Speaker: Francesc Moreno ()
- Title: Optimal Illumination for Image and Video Relighting
- Abstract:
|
It has been shown in the literature that image-based relighting
of scenes with unknown geometry can be achieved through linear
combinations of a set of pre-acquired reference images. Since the
placement and brightness of the light sources can be controlled,
it is natural to ask: what is the optimal way to illuminate the
scene to reduce the number of reference images that are needed?
We show that the best way to light the scene (i.e., the way that
minimizes the number of reference images) is not using a sequence
of single, compact light sources as is most commonly done, but
rather to use a sequence of lighting patterns as given by an
object-dependent lighting basis. While this lighting basis,
which we call the optimal lighting basis (OLB), depends on camera
and scene properties, we show that it can be determined as a
simple calibration procedure before acquisition. We demonstrate
through experiments on real and synthetic data that the optimal
lighting basis significantly reduces the number of reference
images that are needed to achieve a desired level of accuracy in
the relit images. This reduction in the number of needed images
is particularly critical in the problem of relighting in video,
as corresponding points on moving objects must be aligned from
frame to frame during each cycle of the lighting basis. We show,
however, that the efficiencies gained by the optimal lighting
basis makes relighting in video possible using only a simple
optical flow alignment. We present several relighting results
on real video sequences of moving objects, moving faces, and
scenes containing both. In each case, although a single video
clip was captured, we are able to relight again and again,
controlling the lighting direction, extent, and color.
|
- Links: Siggraph05-Sketch,
Slides
1 Seminar 10-3-2005- Speaker: Alejandro Agostini ()
- Title: Feasible Control of Complex Systems using Automatic Learning
- Abstract:
|
Robotics applications often involve dealing with complex dynamic systems. In
these cases coping with control requirements with conventional techniques is
hard to achieve and a big effort has to be done in the design and tuning of
the control system. An alternative to conventional control techniques is the
use of automatic learning systems that could learn control policies
automatically, by means of the experience. But the amount of experience
required in complex problems is intractable unless some generalization is
performed. Many learning techniques have been proposed to deal with this
challenge but the applicability of them in a complex control task is still
impracticable because their bad learning convergence or insufficient
generalization. In this work a new learning technique, that explodes a kind of
generalization called categorization, is used in a complex control task. The
results obtained show that it is possible to learn, in short time and with
good convergence, a control policy that outperforms a classical PID control
tuned for the specific task of controlling a manipulator with high inertia and
variable load.
|
- Links: Slides
|


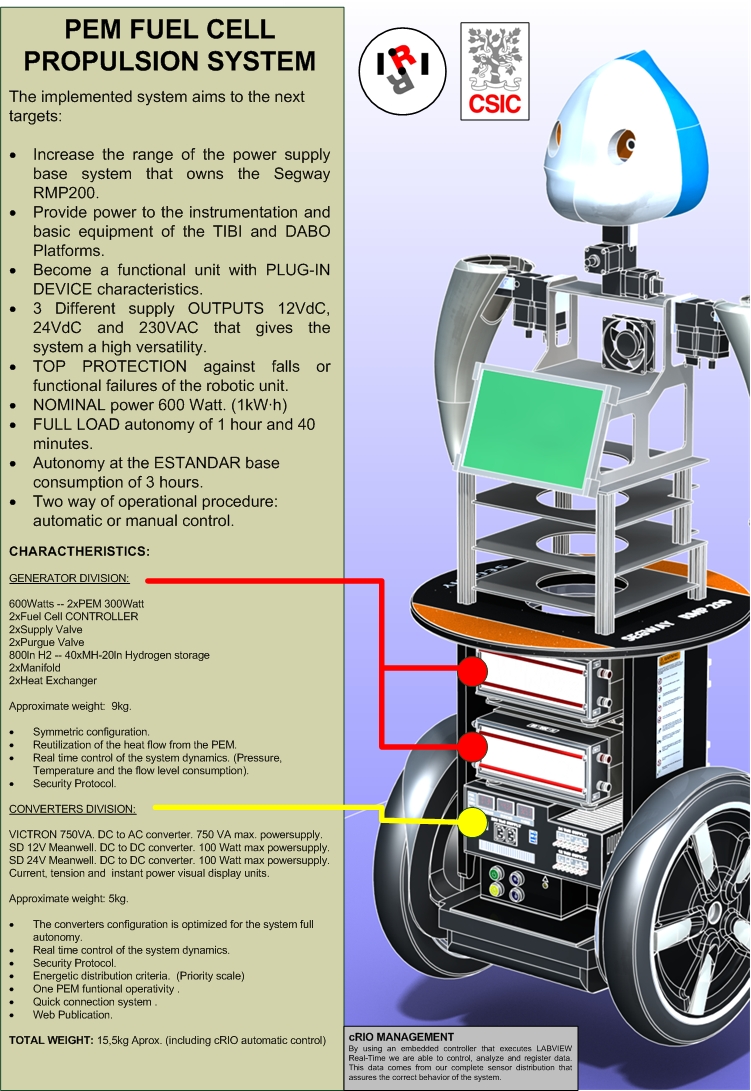{kind=link}
Follow us!